伺服驅(qū)動器選型要求是什么?伺服驅(qū)動和電機系統(tǒng)入門選型介紹,!
伺服控制系統(tǒng)已廣泛應(yīng)用于各類機械設(shè)備上,,那么伺服驅(qū)動器的基本要求有哪些?我們在選型的時候要著重考量哪幾點,?
1,、調(diào)速范圍寬
2、定位精度高
3,、有足夠的傳動剛性和高的速度穩(wěn)定性
4,、快速響應(yīng),無超調(diào)(為了保證生產(chǎn)率和加工質(zhì)量,,除了要求有較高的定位精度外,,伺服電機伺服驅(qū)動器還要求有良好的快速響應(yīng)特性,即要求跟蹤指令信號的響應(yīng)要快,,因為數(shù)控系統(tǒng)在啟動,,制動時,要求加,,減速度足夠大,,縮短進給系統(tǒng)的過渡過程時間,減小輪廓過渡誤差)
5、低速大轉(zhuǎn)矩,,過載能力強(一般來說,,性能優(yōu)越的伺服驅(qū)動器具有數(shù)分鐘甚至半小時內(nèi)1.5倍以上的過載能力,,在短時間內(nèi)可以過載4~6倍而不損壞)
6、可靠性高(要求數(shù)控機床的進給驅(qū)動系統(tǒng)可靠性高,,工作穩(wěn)定性好,,具有較強的溫度,濕度,,振動等環(huán)境適應(yīng)能力和很強的抗干擾的能力)
綜上所述,,以上這6點伺服控制系統(tǒng)要求,便是伺服驅(qū)動器選型時的重要考量因素,。
伺服驅(qū)動和電機系統(tǒng)的選型和選擇入門
伺服驅(qū)動的選型需要一個系統(tǒng)性的解決方案,。換言之,是一個需要考慮整體機械,,電氣和編程參數(shù)的整體方法。該系統(tǒng)包括確定機械負載,、運動曲線(包括定位要求),,伺服電機特性,以及電機和其他組件所處環(huán)境,;特別是當(dāng)電機以接近恒定的速度運行時,,對成品、物料和/或加工過程自身所產(chǎn)生影響,。
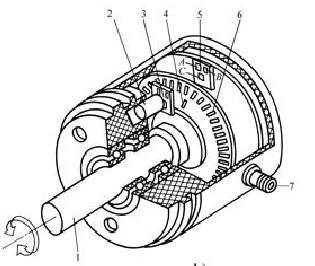
為機器設(shè)計選擇伺服電機系統(tǒng),,首先要了解構(gòu)成伺服電機或伺服驅(qū)動系統(tǒng)的組件。伺服系統(tǒng)是閉環(huán)系統(tǒng),,用于控制某些所需的運動,,它們包括一個反饋裝置,可在電機和驅(qū)動器之間提供恒定信息,,以精確控制被驅(qū)動機構(gòu)的位置,、速度和轉(zhuǎn)矩。
通常,,伺服設(shè)計是高動態(tài)系統(tǒng),,涉及帶動負載快速的加速和減速。它們在四個象限中運行,,這意味著它們可以控制轉(zhuǎn)矩和速度,,無論是正還是負。
伺服驅(qū)動的選型需要一個系統(tǒng)性的解決方案,。換言之,,是一個需要考慮整體機械,電氣和編程參數(shù)的整體方法,。該系統(tǒng)包括確定機械負載,、運動曲線(包括定位要求),,伺服電機特性,以及電機和其他組件所處環(huán)境,;特別是當(dāng)電機以接近恒定的速度運行時,,對成品、物料和/或加工過程自身所產(chǎn)生影響,。
機械負載和運動曲線參數(shù)
讓我們從理解機械負載和運動要求的含義開始,。基礎(chǔ)牛頓物理學(xué)斷言:力(或旋轉(zhuǎn)方向的轉(zhuǎn)矩)與質(zhì)量(旋轉(zhuǎn)慣性)乘以加速度成正比,,無論加速度是正還是負,。在運動設(shè)計的背景下,機器構(gòu)造具有其自身的質(zhì)量和所承載負載的質(zhì)量,。
因此,,確定機械部件很重要——特別是運動質(zhì)量和所需的運動曲線。將旋轉(zhuǎn)運動轉(zhuǎn)化為直線運動的辦法千差萬別,,并受精度,、負載、運動動力學(xué)和環(huán)境等因素影響,。
一旦了解了所使用的機制,,理解運動動力學(xué)對確定最佳伺服電機解決方案來說非常重要。運動曲線不僅包括從一點到另外一點的運動,,而且還包括在這一運動中可能運用的功能,,比如與部件加工相關(guān)的推力。加速,,勻速和減速,,以及停留和暫停時間,都包括在系統(tǒng)的整體運動曲線中,。分度移動可能是簡單的三角運動,,可變梯形或1/3-1/3-1/3(與RMS轉(zhuǎn)矩相關(guān)的最高效運動)。
很多廠商提供選型和選擇工具,,以幫助用戶根據(jù)應(yīng)用的運動要求構(gòu)建運動配置文件,。大部分軟件工具,比如科爾摩根的Motioneering平臺提供多種運動描述方式,,可以協(xié)助您計算加速度,、運動時間、距離,、速度和停留時間,。圖1顯示了基本的1/3-1/3-1/3曲線,引入了50%的加加速度以平滑加速度,。在本例中,,我們選擇在1秒中移動8英寸,,并使用50%的加加速度和2秒的停留時間。系統(tǒng)根據(jù)加速時間的1/3,,勻速的1/3,,以及減速度的1/3來計算運動。使用工具計算出的最大速度為720in/min,??梢钥吹健癝”曲線輪廓(基于50%的加速度)。此外,,對于該運動,,可以看到在運動橫向部分應(yīng)用了推力負載(紅線)——這種運動曲線可能是正在進行加工。停留時間也可以看到為3秒,。停留部分非常重要,,因為所有與該曲線相關(guān)的參數(shù)將被用來計算RMS轉(zhuǎn)矩,它將是我們用來選擇正確電機的一個度量,。除了運動曲線外,,理解負載在分辨率、精度和重復(fù)性的實際定位要求也很重要,。這將受到反饋裝置選擇和(更顯著地)以間隙和柔量形式的機械配件空動量的直接影響。
除非設(shè)計可以使用直驅(qū)動電機解決方案,,否則它將包括某些類型的機械傳動,。旋轉(zhuǎn)變線性的動力傳動(將旋轉(zhuǎn)電機輸出轉(zhuǎn)換成軸行程)可通過皮帶輪驅(qū)動,或基于螺桿的機構(gòu)完成,,比如滾珠絲杠,。旋轉(zhuǎn)傳動包括齒輪箱或皮帶驅(qū)動組件,以便使用各種尺寸的滑輪作為減速器,。在某些應(yīng)用中,,被移動的部件對總運動質(zhì)量具有顯著貢獻。一種特殊情況就是機器軸必須移動變化的質(zhì)量——比如在機器人系統(tǒng)的分配或加工過程中,。其中總負載變化可能是調(diào)整伺服驅(qū)動的一個因素,。
運動中的組件必須將其慣量求和并反射回電機軸,除慣量外,,還必須考慮外力,、摩擦和低效率問題。
伺服設(shè)計的環(huán)境考慮因素
這還沒有結(jié)束,。在確定伺服設(shè)計時,,只有某些可用的機構(gòu)才能經(jīng)濟高效地提供所需的運動、承載能力和精度,。經(jīng)常被忽視的一個考慮就是伺服系統(tǒng)運行所在的環(huán)境,。大多數(shù)伺服電機的額定工作溫度為40℃——這是一個非常溫暖的環(huán)境,,但在許多工廠和工業(yè)環(huán)境中都是典型的。
驅(qū)動電子器件的耐熱性不是很高,,并且由于它們的額定環(huán)境溫度也是40℃,,因此管理它們運行處的環(huán)境溫度成為一個挑戰(zhàn)。通常,,需要在控制柜內(nèi)采用強制冷卻方法,,以保持適當(dāng)?shù)沫h(huán)境條件(溫度和濕度)。因此,,必須考慮電機和驅(qū)動器所在的位置,。當(dāng)然,可以將電機直接安裝或集成到設(shè)備上,,以驅(qū)動承載負荷的機制,。相比之下,集中式方案中的驅(qū)動器位于控制柜內(nèi)——它通常需要獲得冷卻,。
制造商根據(jù)電機運行的環(huán)境條件來定義部分電機性能,。如上所述,許多設(shè)計人員假定電機的額定環(huán)境溫度為40℃,,但是偶爾提供的電機規(guī)格是25℃,。因此,在審查規(guī)格時要注意了解所公布的額定參考值,。如果機器運行的環(huán)境溫度超過額定環(huán)境溫度,,電機將無法達到額定功率。
其他環(huán)境條件可能會影響到電機油漆和密封件以及其他機械子組件,?;覊m,污垢,,潮濕,,噴霧沖洗,衛(wèi)生要求,,爆炸性環(huán)境,,真空環(huán)境以及輻射都需要特殊的伺服電機,具有針對當(dāng)前惡劣環(huán)境量身定制的物理特性,。
選擇過程
在確定所需要的電機/驅(qū)動器系統(tǒng)構(gòu)成時,,前期選型工作的很大一部分來自機械和環(huán)境。現(xiàn)在,,當(dāng)用戶選擇最終產(chǎn)品時,,必須考慮該系統(tǒng)所包含的其余系統(tǒng)組件。機械和環(huán)境將會繼續(xù)影響對于反饋元件,、布線以及最終選擇的控制架構(gòu),。
反饋考慮和伺服電機特性
根據(jù)定義,,伺服系統(tǒng)具有在運行過程中測量速度、位置和其他系統(tǒng)參數(shù)的反饋裝置,。制造商可能只有有限的選擇,,但是應(yīng)仔細考慮具體的應(yīng)用參數(shù),包括沖擊負載和定位精度以及可重復(fù)性,,這至關(guān)重要,。旋轉(zhuǎn)變壓器往往在嚴(yán)苛環(huán)境下具有出色的性能,特別是對于較高的沖擊負荷,。旋轉(zhuǎn)變壓器是旋轉(zhuǎn)的變壓器,,包括定子和轉(zhuǎn)子部分圍繞內(nèi)核的纏繞線圈。相對于可能含有玻璃盤元件的編碼器,,這種結(jié)構(gòu)允許以更高的溫度運行,,并且對于高沖擊負載具有更高的耐受性。
正弦編碼器可以提供高分辨率,,高達24位以及更高,,以獲得最佳定位精度。一些混合編碼器可以通過更好的分辨能力來提供旋轉(zhuǎn)變壓器的穩(wěn)健性,。這些智能編碼器基于具有電子元件的旋轉(zhuǎn)變壓器,,可以解讀正弦和余弦信號,并將它們轉(zhuǎn)換成高分辨率的數(shù)字信號,,該信號將被傳遞給伺服驅(qū)動器,,以便用于速度和位置反饋。
目前,,最新的編碼器提供各種通信協(xié)議(EnDAT,BiSS和DSL),,并提供高分辨率和低噪聲能力,,以幫助實現(xiàn)向伺服驅(qū)動器和控制器提供最佳反饋信號。
另外一個取決于應(yīng)用要求的反饋選擇就是需要絕對位置反饋還是增量反饋,。在旋轉(zhuǎn)系統(tǒng)中,,一旦使用單圈設(shè)備完成360度旋轉(zhuǎn),就可以從0開始計數(shù),。而多圈絕對編碼器可以讓系統(tǒng)知道它的位置,,不僅是電機在360度旋轉(zhuǎn)中的位置,而且知道在每個方向上它所完成的圈數(shù),。因此,,它知道自己的精確位置。知道這一點和工具及其他軸的位置非常重要,。另一方面,,簡單的增量編碼器可以確定在一個單圈旋轉(zhuǎn)中的位置,,但是只有在上電周期中找到零點之后。因此,,用戶將不知道完成了多少個周期,,甚至是在上電時在360度旋轉(zhuǎn)中的絕對位置。
除了伺服電機和伺服驅(qū)動器本身之外,,實際上二者之間的接線也很重要,。電纜柔韌性(通過其允許彎曲半徑加以定義)是一個主要考慮因素,特別是當(dāng)電纜與軸一起運動時,。
電纜長度可能受所考慮編碼器類型的限制,。阻抗,壓降等電纜參數(shù),,結(jié)合編碼器的信號強度是長度考慮方面的關(guān)鍵要素,。市場上提供的一些較新的設(shè)備以非常高的傳輸速率向驅(qū)動器(比如DSL,EnDat和BiSS)傳輸串行信息,,這些信息將會受到長度的影響,,特別是阻抗和信噪比。甚至連接器也在“反饋”循環(huán)中起作用,,因為連接器需要處理從這些設(shè)備生成的各種信號,。與電機功率相關(guān)的另外一個電纜長度要素與當(dāng)今PWM驅(qū)動器中涉及的高開關(guān)頻率相關(guān)。電機電源線中存在噪聲,,當(dāng)電纜變長并接近電纜上頻率波長的一半時,,將會形成一個天線。天線會發(fā)送或接收信息(在這種情況下產(chǎn)生噪聲),,這是不應(yīng)該出現(xiàn)在高性能系統(tǒng)中的,。
最后一個參數(shù):運動控制和網(wǎng)絡(luò)——集中式與分散式
最后一個考慮因素可能會造成整體設(shè)計過程重復(fù)(以及改變設(shè)計的其他指定組件)的一項考慮就是系統(tǒng)架構(gòu)。工程師必須要問:我應(yīng)當(dāng)專注于一種帶有驅(qū)動器,、控制器和支持電子器件,,并封裝在一個集中機柜內(nèi)的集中控制系統(tǒng),還是將驅(qū)動器在機器上加以分散(一種分布式系統(tǒng)方法)才更加有利,,性價比更高,?具有多個軸(這些軸可能分散在機器各個位置)的機器,將是分布式解決方案的理想候選者,。這種方法可以大幅減少電纜需求,,節(jié)省長電纜的布線以及與這些電纜配套的電纜槽和支架相關(guān)的成本。此外,,將驅(qū)動器移出機器可以減小容納控制和支持電子組件所需機柜的尺寸,,從而再次降低成本,并降低機柜內(nèi)的冷卻要求。另一方面,,緊湊型并具有較少軸數(shù)的機器將不會受益于傳統(tǒng)集中式方法,。
結(jié)論
在針對應(yīng)用選型伺服系統(tǒng)時必須考慮許多事情,在本文中已經(jīng)介紹了其中的許多要素,。影響組件選擇的另一個選擇就控制系統(tǒng),。控制類型通常在機器設(shè)計討論的早期階段就已經(jīng)指定,,并取決于多種因素,,同時控制選擇通常鎖定現(xiàn)場總線通信標(biāo)準(zhǔn)的選擇。