步進(jìn)電機(jī)出現(xiàn)故障要怎么解決,?步進(jìn)電機(jī)和交流步進(jìn)電機(jī)的性能比較,!
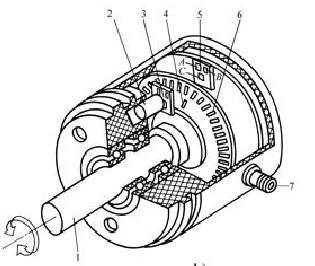
經(jīng)常使用步進(jìn)電機(jī)的用戶都知道它的工作原理,其實(shí)就是利用電路把直流電變成分時(shí)供電,多相時(shí)序控制電流,,然后這種電流為步進(jìn)電機(jī)供電這樣它才能正常工作,。也有不少人會(huì)遇到步進(jìn)電機(jī)出現(xiàn)不能正常工作出現(xiàn)故障了,那么應(yīng)該怎么解決呢,?今天小編為大家分享兩種實(shí)用的方法,。
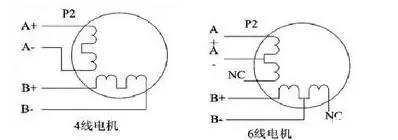
第一,不要連接任何設(shè)備和電線,,分開步進(jìn)電機(jī)的每根電線,,不要接觸電線,用手轉(zhuǎn)動(dòng)轉(zhuǎn)軸,,一個(gè)好的電機(jī)只需要一定的力就能平穩(wěn)地轉(zhuǎn)動(dòng),,中間沒有堵塞。如果中間某個(gè)位置卡住或完全不能轉(zhuǎn)動(dòng),,則表明電機(jī)損壞,,這可能是軸承位移和內(nèi)部轉(zhuǎn)子和定子磨損。損壞應(yīng)該是由過度的外力造成的,。
萬用表可用于測(cè)量“相鄰”兩相的阻抗,,該阻抗應(yīng)等于產(chǎn)品給出的線圈阻抗,。如果上設(shè)備檢測(cè)到空轉(zhuǎn),它應(yīng)該能夠達(dá)到規(guī)定的轉(zhuǎn)速,,并且在正常轉(zhuǎn)速下,,發(fā)出的噪音應(yīng)該穩(wěn)定。此外,,還需要進(jìn)行負(fù)載測(cè)試,。具體的測(cè)試參數(shù)需要與負(fù)載扭矩和電機(jī)扭矩相結(jié)合,。我們要知道電機(jī)越大,,將導(dǎo)線擰在一起所需的力就越大,所以普通的步進(jìn)電機(jī)根本不能用人力來擰,。(螺紋擰在一起越多,,需要的力就越大。如果無效,,則表明線圈壞,。測(cè)試設(shè)備時(shí),空轉(zhuǎn)時(shí)應(yīng)能達(dá)到規(guī)定的轉(zhuǎn)速,,正常轉(zhuǎn)速下產(chǎn)生的噪音應(yīng)穩(wěn)定,。此外,還需要進(jìn)行負(fù)載測(cè)試,。具體的測(cè)試參數(shù)需要負(fù)載扭矩和電機(jī)扭矩相結(jié)合,。
第二,,如果電線擰在一起,電機(jī)越大,,擰動(dòng)所需的力就越大,,一般的步進(jìn)電機(jī)根本不能用人力擰。(線擰在一起越多,,需要的力就越大,。如果無效,則表明線圈壞,。
其實(shí)就同步電機(jī)來說,,除了上述小編講的方法外,還有一點(diǎn)一定不能忽視,,那就是要仔細(xì)觀察轉(zhuǎn)子,。假如轉(zhuǎn)子有空隙的話,且位置良好且很小,,釘子不能嵌入,,且動(dòng)態(tài)性能至少為80%或更高,此時(shí)很容易失步,,建議更換,。步進(jìn)電機(jī)的致命弱點(diǎn)是在裝載和卸載過程中不能被敲擊,并且很容易振動(dòng)內(nèi)部的編碼器,。步進(jìn)電機(jī)的功率線圈燒壞的概率相對(duì)較低,,編碼器和關(guān)節(jié)損壞較為常見,而常見的步進(jìn)故障是編碼器故障,。
步進(jìn)電機(jī)和交流步進(jìn)電機(jī)的性能比較
步進(jìn)電機(jī)已經(jīng)應(yīng)用各個(gè)領(lǐng)域,,目前,步進(jìn)電機(jī)廣泛應(yīng)用于家用數(shù)控系統(tǒng)中,。伴隨著全數(shù)字交流步進(jìn)電機(jī)的出現(xiàn),,步進(jìn)電機(jī)在數(shù)字控制系統(tǒng)中的應(yīng)用也越來越廣泛。為適應(yīng)數(shù)字化控制的發(fā)展趨勢(shì),,步進(jìn)電機(jī)或全數(shù)字化交流步進(jìn)電機(jī)多用于運(yùn)動(dòng)控制系統(tǒng)中,。雖然這兩種控制方式(脈沖序列和方向信號(hào))相似,但在性能和應(yīng)用上有很大差別,。對(duì)比兩者的表現(xiàn),。
1.不同控制精度的兩相混合步進(jìn)電動(dòng)機(jī)的步進(jìn)角一般為3.6°和1.8°,五相混合步進(jìn)電動(dòng)機(jī)的步進(jìn)角一般為0.72°和0.36°,。也有一些步進(jìn)角小的高性能步進(jìn)電機(jī),。
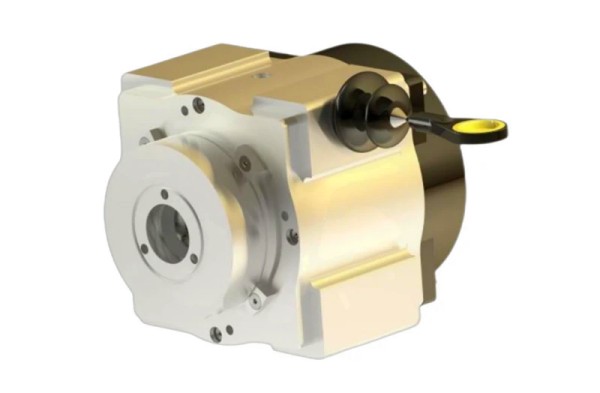
電機(jī)軸后端的旋轉(zhuǎn)編碼器保證了交流步進(jìn)電動(dòng)機(jī)控制精度。就全數(shù)字 AC步進(jìn)電動(dòng)機(jī)來說,對(duì)于帶2500行編碼器的電動(dòng)機(jī)來說,,由于驅(qū)動(dòng)器采用四倍頻技術(shù),,所以脈沖當(dāng)量為360°/10000=0.036°。對(duì)采用了17位編碼器的電機(jī)來說,,每接收到217=131072個(gè)脈沖,,電機(jī)就會(huì)旋轉(zhuǎn)一次,也就是說,,360°/131072=9.89秒,。這就是1/655步進(jìn)電機(jī)脈沖當(dāng)量,步進(jìn)角為1.8°,。
2.不同低頻特征
步進(jìn)電機(jī)低速時(shí)易發(fā)生低頻振動(dòng),。振蕩頻率與負(fù)載和驅(qū)動(dòng)性能有關(guān)。振動(dòng)頻率一般為電動(dòng)機(jī)空載起動(dòng)頻率的一半,。根據(jù)步進(jìn)電機(jī)的工作原理所確定的這種低頻振動(dòng)現(xiàn)象,,對(duì)機(jī)器的正常運(yùn)行極為不利。步進(jìn)電動(dòng)機(jī)在低速運(yùn)行時(shí),,一般應(yīng)采用減振技術(shù),,如在電動(dòng)機(jī)上加裝減振器或在驅(qū)動(dòng)器上采用減振技術(shù),以克服低頻振動(dòng)的現(xiàn)象,。
該步進(jìn)電機(jī)的運(yùn)行非常平穩(wěn),,甚至在低速時(shí)也沒有振動(dòng)。該系統(tǒng)具有諧振抑制功能,,可彌補(bǔ)機(jī)械剛度不足,;該系統(tǒng)具有頻率分析功能,可檢測(cè)機(jī)械共振點(diǎn),,便于系統(tǒng)調(diào)節(jié),。
3.不同扭矩的頻率特征
步進(jìn)電動(dòng)機(jī)的輸出轉(zhuǎn)矩隨轉(zhuǎn)速的增加而降低,當(dāng)轉(zhuǎn)速較高時(shí)則急劇下降,,所以它的最大運(yùn)行速度一般為300~600 RPM,。交流步進(jìn)電動(dòng)機(jī)的輸出為恒定轉(zhuǎn)矩,即在其額定轉(zhuǎn)速下(通常為2000 RPM或3000 RPM)和高于其額定轉(zhuǎn)速下的恒定功率下均可輸出,。
4.不同超載能力
一般情況下,,步進(jìn)電機(jī)沒有過載能力。步進(jìn)電動(dòng)機(jī)具有較強(qiáng)的過載性能,。作為一個(gè)例子,松下交流步進(jìn)系統(tǒng)具有速度過載和力矩過載兩種功能,。其最大扭矩為額定扭矩的三倍,,可以用來克服慣性負(fù)載在啟動(dòng)時(shí)的轉(zhuǎn)動(dòng)慣量。因?yàn)椴竭M(jìn)電動(dòng)機(jī)不具有這樣的過載能力,所以在選擇模型時(shí),,為了克服選擇慣性矩的問題,,通常需要選擇轉(zhuǎn)矩較大的電動(dòng)機(jī),在正常運(yùn)行過程中,,電動(dòng)機(jī)不需要太大的轉(zhuǎn)矩,,從而造成了扭力浪費(fèi)。
5.不同操作性能
步進(jìn)電機(jī)控制采用開環(huán)控制,。起動(dòng)頻率過高或負(fù)荷過大,,都可能會(huì)發(fā)生失穩(wěn)或旋轉(zhuǎn)受阻。車速停了,,容易出現(xiàn)過沖現(xiàn)象,。提高或降低速度。AC級(jí)驅(qū)動(dòng)系統(tǒng)采用閉環(huán)控制,。驅(qū)動(dòng)可直接從電機(jī)編碼器采集反饋信號(hào),。內(nèi)位置與速度環(huán)形成。一般情況下,,步進(jìn)電動(dòng)機(jī)不會(huì)失步或超調(diào),,控制性能更可靠。
6.速度響應(yīng)性能各不相同
步進(jìn)電動(dòng)機(jī)由靜止加速到工作速度(通常是每分鐘幾百轉(zhuǎn))需要200至400毫秒,。交流步進(jìn)系統(tǒng)有較好的加速性能,。就拿 MSMA 400 W的交流步進(jìn)電動(dòng)機(jī)來說,從靜止加速到3000 RPM的額定速度只需要幾毫秒,。適用于需要快速啟動(dòng)和停止的控制場(chǎng)合,。