進(jìn)口伺服電機(jī)有哪些調(diào)試步驟,?伺服系統(tǒng)的幾種運(yùn)動(dòng)控制方式介紹,!
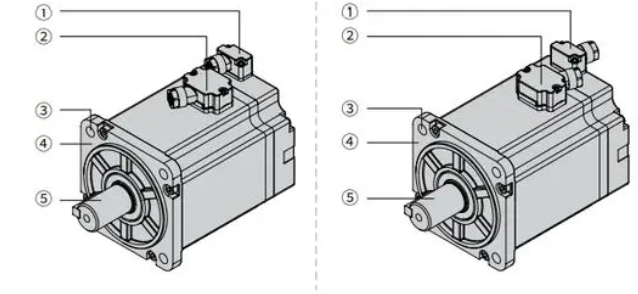
伺服電機(jī)具有自整定功能,,可對(duì)剛性低的裝置進(jìn)行自動(dòng)適當(dāng)調(diào)整,,滿足絕大部分應(yīng)用場(chǎng)合,;關(guān)鍵零件設(shè)計(jì)壽命長(zhǎng)達(dá)10年間,,保障設(shè)備順暢運(yùn)行;產(chǎn)品型號(hào)從最小50W到最大3000W,滿足各種需求,;
下面幾點(diǎn)是伺服電機(jī)?調(diào)試步驟:
初始化參數(shù):在接線之前,,先初始化參數(shù),。在控制卡上:選好控制方式,將PID參數(shù)清零,,讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉,,將此狀態(tài)保存,確??刂瓶ㄔ俅紊想姇r(shí)即為此狀態(tài),;在伺服電機(jī)上:設(shè)置控制方式,設(shè)置使能由外部控制,,編碼器信號(hào)輸出的齒輪比,,設(shè)置控制信號(hào)與電機(jī)轉(zhuǎn)速的比列關(guān)系,一般來(lái)說(shuō),建議使用伺服工作中的最大設(shè)計(jì)轉(zhuǎn)速對(duì)應(yīng)9V的控制電壓,。
接線:將控制卡斷電,,連接控制卡與伺服之間的信號(hào)線。以下的線是必須要接的:控制卡的模擬量輸出線,、使能信號(hào)線,、伺服電機(jī)?輸出的編碼器信號(hào)線。復(fù)查接線沒(méi)有錯(cuò)誤后,,伺服電機(jī)和控制卡上電,,此時(shí)電機(jī)應(yīng)該不動(dòng),而且可以用外力輕松轉(zhuǎn)動(dòng),,如果不是這樣,,檢查使能信號(hào)的設(shè)置與接線,用外力轉(zhuǎn)動(dòng)電機(jī),,檢查控制卡是否可以正確檢查到電機(jī)位置的變化,,否則檢查編碼器信號(hào)的接線和設(shè)置。
試方向:對(duì)于一個(gè)閉環(huán)控制系統(tǒng),,如果反饋信號(hào)的方向不正確,,后果肯定是災(zāi)難性的,通過(guò)控制卡打開(kāi)方伺服電機(jī)使能信號(hào),,這個(gè)伺服應(yīng)該以一個(gè)較低的速度轉(zhuǎn)動(dòng),,這就是傳說(shuō)中的零漂,一般控制卡上都會(huì)有抑制零漂的指令和參數(shù),,使用這個(gè)指令或參數(shù),,看伺服電機(jī)的轉(zhuǎn)速和方向是否可以通過(guò)這個(gè)指令(參數(shù))控制,如果不能控制,,檢查模擬量接線及控制方式的參數(shù)設(shè)置,;確認(rèn)給正數(shù),伺服電機(jī)正轉(zhuǎn),,編碼器計(jì)數(shù)增加,,給出負(fù)數(shù),電機(jī)反轉(zhuǎn)轉(zhuǎn),,編碼器計(jì)數(shù)減小,,如果電機(jī)帶負(fù)載,行程有限,,不要采用這種方式,,測(cè)試不要給過(guò)大的電壓,建議在1V以下,,如果方向不一致,,可以修改控制卡或伺服電機(jī)上的參數(shù),,使其一致。
抑制零漂:在閉環(huán)伺服控制過(guò)程中,,零漂的存在會(huì)對(duì)控制效果有一定的影響,,最好將其抑制住,使用控制卡或伺服上的抑制零漂的參數(shù),,仔細(xì)調(diào)整,,使用電機(jī)的轉(zhuǎn)速近與零。由于零漂本身也有一定的隨機(jī)性,,所以不必要求伺服電機(jī)轉(zhuǎn)速絕對(duì)為零,。
建立閉環(huán)伺服控制:再次通過(guò)控制卡將伺服電機(jī)使能信號(hào)放開(kāi),在控制卡上輸入一個(gè)較小的比例增益,,至于多大算較小,,這只能憑感覺(jué)了,如果實(shí)在不放心,,就輸入控制卡能允許的最小值,,將控制卡和伺服電機(jī)的使能信號(hào)打開(kāi),這時(shí),,電話應(yīng)該已經(jīng)能夠按照運(yùn)動(dòng)指令大致做出動(dòng)作了,。
調(diào)整閉環(huán)參數(shù):細(xì)調(diào)控制參數(shù),確保伺服電機(jī) 按照控制卡指令運(yùn)動(dòng),,這就是必須要做的工作,,而這部分工作,更多的是經(jīng)驗(yàn),,這樣只能從略了,。
伺服系統(tǒng)幾種運(yùn)動(dòng)控制
伺服系統(tǒng)運(yùn)動(dòng)控制發(fā)展迅速,減少勞動(dòng)力與勞動(dòng)成本,,提高了工業(yè)效率,是工業(yè)自動(dòng)化行業(yè)福星,!
氣動(dòng)和液壓伺服控制
盡管氣動(dòng)和液壓伺服在當(dāng)今的自動(dòng)化運(yùn)控市場(chǎng)并不十分常見(jiàn),,但在很多行業(yè)應(yīng)用場(chǎng)合中它們還是具備極強(qiáng)的不可替代性。因此有必要在這里先簡(jiǎn)單提一提,。
氣動(dòng)和液壓伺服都是以流體壓力作為動(dòng)力驅(qū)動(dòng)和控制負(fù)載運(yùn)行的,,因此二者在產(chǎn)品形態(tài)和系統(tǒng)架構(gòu)上有著不少相似之處。
首先,,能夠?yàn)闅鈩?dòng)或液壓系統(tǒng)提供流體壓縮動(dòng)力的,,自然就是泵站,也就是空壓機(jī)和液壓站,。它們通過(guò)內(nèi)部的電機(jī)驅(qū)動(dòng)葉輪旋轉(zhuǎn),,壓縮流體管路的氣體或液壓油,,然后借助特定的壓力調(diào)節(jié)裝置,在系統(tǒng)回路(氣路或油路)中產(chǎn)生穩(wěn)定的流體壓縮動(dòng)力,。
但此時(shí)管路中的壓縮動(dòng)力是不能直接用來(lái)控制負(fù)載運(yùn)動(dòng)的,,原因在于其輸出的方向和大小并未根據(jù)應(yīng)用需求進(jìn)行過(guò)調(diào)節(jié)和控制,這就需要在流體回路中使用各種閥,。例如:用節(jié)流閥可以手動(dòng)實(shí)現(xiàn)最基本的速度調(diào)節(jié),;通過(guò)帶有控制輸入的比例方向閥或比例壓力閥,能夠?qū)敵鏊俣然驂毫M(jìn)行動(dòng)態(tài)調(diào)節(jié),;而如果要做到比較精準(zhǔn)的位置控制,,就需要用到伺服比例閥,并結(jié)合特定的位置反饋裝置,。
如果說(shuō)各類(lèi)閥的作用是將泵站的輸出經(jīng)調(diào)節(jié)轉(zhuǎn)換成應(yīng)用所需的可變流體動(dòng)力,,那么氣缸或液壓缸就是基于這些流體壓縮動(dòng)力最終驅(qū)動(dòng)和控制負(fù)載運(yùn)動(dòng)的執(zhí)行機(jī)構(gòu)。無(wú)論是氣缸還是液壓缸,,其原理都是通過(guò)流體壓縮后產(chǎn)生的壓力驅(qū)動(dòng)其內(nèi)部推桿產(chǎn)生活塞式運(yùn)動(dòng),,因此這些缸的輸出都是在有限行程范圍內(nèi)的往復(fù)直線運(yùn)動(dòng),并能夠在其末端產(chǎn)生一定的推力或拉力,。
上面說(shuō)的這些其實(shí)都僅僅是氣動(dòng)和液壓技術(shù)在動(dòng)力傳動(dòng)環(huán)節(jié)的產(chǎn)品,,而要能夠?qū)⑵浞Q(chēng)之為伺服并用于實(shí)現(xiàn)精準(zhǔn)的運(yùn)動(dòng)控制,反饋裝置則是必不可少的,。在氣動(dòng)和液壓伺服系統(tǒng)中,,通常會(huì)使用專(zhuān)門(mén)的氣缸或油缸位置傳感器(例如:缸體內(nèi)置的霍爾元件等),而設(shè)備控制系統(tǒng)則會(huì)基于傳感器的反饋與設(shè)定的應(yīng)用參數(shù),,通過(guò)對(duì)各類(lèi)閥的開(kāi)閉動(dòng)作進(jìn)行實(shí)時(shí)調(diào)節(jié),,調(diào)整缸體內(nèi)流體的壓力和方向,以最終實(shí)現(xiàn)對(duì)負(fù)載運(yùn)行姿態(tài)的控制,。
變頻伺服控制
必須承認(rèn),,由于技術(shù)日趨成熟,以及總體成本和技術(shù)門(mén)檻不斷降低,,變頻伺服已經(jīng)在大量應(yīng)用中取代了包括上述氣動(dòng)和液壓在內(nèi)的其他類(lèi)型的伺服技術(shù),,逐漸成為工業(yè)運(yùn)控領(lǐng)域的絕對(duì)主力。
變頻伺服,,顧名思義,,它是以可變頻交流電為動(dòng)力的伺服技術(shù)。而我們知道,,以我們目前掌握的電力驅(qū)動(dòng)技術(shù)來(lái)說(shuō),,這種可變頻率的交流電基本上必須通過(guò)直流電逆變生成的,因此,,變頻伺服系統(tǒng)所使用的動(dòng)力通常是來(lái)自穩(wěn)定的直流電源,,可以是電池組,,也可以是能夠?qū)⒔涣麟娹D(zhuǎn)換為直流電的整流裝置。
有了穩(wěn)定的直流電源,,要產(chǎn)生可變頻率的交流電輸出,,就需要使用變頻驅(qū)動(dòng)器(俗稱(chēng)“伺服驅(qū)動(dòng)器”)作為中間的動(dòng)力轉(zhuǎn)換裝置。在伺服系統(tǒng)中使用的變頻伺服驅(qū)動(dòng)器與一般的工業(yè)變頻器在工作原理上并沒(méi)有太大的差別,,不過(guò)由于其所面對(duì)的設(shè)備應(yīng)用在運(yùn)行精度和動(dòng)態(tài)性能方面有著更為嚴(yán)苛的要求,,因此往往會(huì)表現(xiàn)出更加激進(jìn)的控制特性(如:較高的頻響帶寬),與此同時(shí),,集成運(yùn)控反饋端口也就成為了伺服驅(qū)動(dòng)器的標(biāo)配,。
在變頻伺服系統(tǒng)中,將可變頻交流電轉(zhuǎn)換為機(jī)械動(dòng)力的傳動(dòng)執(zhí)行部件通常是各類(lèi)電機(jī),,這個(gè)也是和一般的變頻傳動(dòng)技術(shù)類(lèi)似的,。但為了能夠在更寬的速度范圍內(nèi)(尤其是低速)獲得優(yōu)質(zhì)的動(dòng)態(tài)響應(yīng)特性,變頻伺服通常會(huì)使用集成運(yùn)動(dòng)反饋的永磁同步電機(jī),。
此外,,為了能夠簡(jiǎn)化設(shè)備系統(tǒng)的傳動(dòng)環(huán)節(jié)、提升綜合傳動(dòng)效率和控制性能,,除了有普通旋轉(zhuǎn)電機(jī)以外,,變頻伺服的傳動(dòng)執(zhí)行部件還經(jīng)常會(huì)有一些不同類(lèi)型的動(dòng)力輸出形式,如:旋轉(zhuǎn)直接驅(qū)動(dòng)電機(jī),、直線電機(jī),、直線電動(dòng)缸等等。
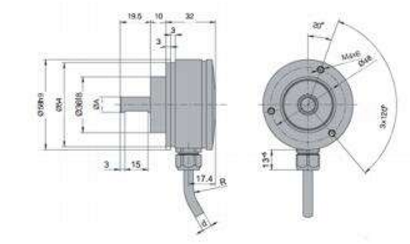
在將旋轉(zhuǎn)伺服電機(jī)的輸出動(dòng)力傳遞到最終運(yùn)動(dòng)負(fù)載的過(guò)程中,,運(yùn)控系統(tǒng)系統(tǒng)往往還需要使用到各種伺服級(jí)別的機(jī)械傳動(dòng)組件,,如:聯(lián)軸器、減速機(jī),、同步帶,、絲杠等等,這一點(diǎn)也是有必要提醒大家注意的,。 同樣,,變頻伺服控制也需要使用反饋裝置,也就是編碼器,,這是所有伺服運(yùn)控系統(tǒng)都必備的。如果是旋轉(zhuǎn)伺服電機(jī),,一般就是其軸末端的反饋編碼器,;若是直線電機(jī),則是直線編碼器和光柵尺,;有時(shí),,伺服系統(tǒng)還可能會(huì)在某個(gè)負(fù)載工位上使用不止一個(gè)編碼器反饋,,以減少因中間傳動(dòng)環(huán)節(jié)引起的測(cè)量誤差,從而進(jìn)一步提升系統(tǒng)反饋精度,。
當(dāng)然,,在使用伺服傳動(dòng)技術(shù)時(shí),除了上面提到的這些高性能驅(qū)動(dòng)和反饋裝置,,往往還需要有包括:控制器,、輸入輸出 I/O 模組、傳感器,、軟件,、網(wǎng)絡(luò)、安全,、連接器,、線纜等在內(nèi)的各類(lèi)產(chǎn)品和技術(shù)組件。不難看出,,這幾乎已經(jīng)是一套完整的設(shè)備控制系統(tǒng)了,。
另外,隨著工業(yè)設(shè)備的智能化程度越來(lái)越高,,其機(jī)電系統(tǒng)也正在變得越來(lái)越龐大,、復(fù)雜,各類(lèi)部件之間各種功能和結(jié)構(gòu)上的集成與融合也就是很自然的發(fā)展趨勢(shì),,于是我們看到了市面上不斷涌現(xiàn)出來(lái)的各式各樣的機(jī)電一體化產(chǎn)品,,如:集成驅(qū)動(dòng)電機(jī)、電驅(qū)傳輸軌道,、集成減速機(jī)電機(jī)等等,。