伺服系統(tǒng)有什么設(shè)計(jì)要求,?伺服電機(jī)的原理及分類介紹,!
伺服系統(tǒng)結(jié)構(gòu)上的復(fù)雜性,,決定了其設(shè)計(jì)過程的復(fù)雜性,。實(shí)際伺服系統(tǒng)的設(shè)計(jì)是很難一次成功的,往往都要經(jīng)過多次反復(fù)修改和調(diào)試才能獲得滿意的結(jié)果,。下面僅對(duì)伺服系統(tǒng)設(shè)計(jì)的一般步驟和方法作一簡(jiǎn)單介紹,。

伺服系統(tǒng)設(shè)計(jì)要求
1,、穩(wěn)定性
伺服系統(tǒng)的穩(wěn)定性指在系統(tǒng)上的擾動(dòng)信號(hào)消失后,系統(tǒng)能夠恢復(fù)到原來的穩(wěn)定狀態(tài)下運(yùn)行,,或者在輸入的指令信號(hào)作用下,,能夠達(dá)到的新的穩(wěn)定運(yùn)行狀態(tài)的能力。
穩(wěn)定性要求是一項(xiàng)最基本的要求,,是保證伺服系統(tǒng)能夠正常運(yùn)行的最基本條件,。
2、精度
伺服系統(tǒng)的精度是指其輸出量復(fù)現(xiàn)輸入指令信號(hào)的精確程度,。
系統(tǒng)中各個(gè)元件的誤差都會(huì)影響到系統(tǒng)的精度,如傳感器的靈敏度和精度,、伺服放大器的零點(diǎn)漂移和死區(qū)誤差,、機(jī)械裝置中的反向間隙和傳動(dòng)誤差,、各元器件的非線性因素等。反映在伺服系統(tǒng)_上就會(huì)表現(xiàn)出動(dòng)態(tài)誤差,、穩(wěn)態(tài)誤差和靜態(tài)誤差,,伺服系統(tǒng)應(yīng)在比較經(jīng)濟(jì)的條件下達(dá)到給定的精度。
3,、快速響應(yīng)性
快速響應(yīng)性是指系統(tǒng)輸出量快速跟隨輸入指令信號(hào)變化的能力,,它主要取決于系統(tǒng)的阻尼比和固有頻率可以提高快速響應(yīng)性,但對(duì)系統(tǒng)的穩(wěn)定性和最大超調(diào)量有不利影響,,因此系統(tǒng)設(shè)計(jì)時(shí)應(yīng)該對(duì)兩者進(jìn)行優(yōu)化,,使系統(tǒng)的輸出響應(yīng)速度盡可能快。
4,、靈敏度
系統(tǒng)各元件的參數(shù)變化等都會(huì)影響系統(tǒng)的性能,,系統(tǒng)對(duì)這些變化的靈敏度要小,即系統(tǒng)的性能應(yīng)不受參數(shù)變化的影響,。具體措施為:對(duì)于開環(huán)系統(tǒng),,應(yīng)嚴(yán)格挑選各元件;對(duì)于閉環(huán)系統(tǒng),對(duì)輸出通道中元件的挑選標(biāo)準(zhǔn)可適當(dāng)放寬,,對(duì)反饋通道的各元件必須嚴(yán)格挑選,,以改善系統(tǒng)的靈敏度。
伺服系統(tǒng)設(shè)計(jì)步驟及方法
1,、設(shè)計(jì)要求分析,,系統(tǒng)方案設(shè)計(jì)
首先對(duì)伺服系統(tǒng)的設(shè)計(jì)要求進(jìn)行分析,明確其應(yīng)用場(chǎng)合和目的,、基本性能指標(biāo)及其它性能指標(biāo),,然后根據(jù)現(xiàn)有技術(shù)條件擬定幾種技術(shù)方案,經(jīng)過評(píng)價(jià),、對(duì)比,,選定一種比較合理的方案。
方案設(shè)計(jì)應(yīng)包括下述一些內(nèi)容:控制方式選擇,;執(zhí)行元件選擇,;傳感器及其檢測(cè)裝置選擇;機(jī)械傳動(dòng)及執(zhí)行機(jī)構(gòu)選擇等,。方案設(shè)計(jì)是系統(tǒng)設(shè)計(jì)的第一步,,各構(gòu)成環(huán)節(jié)的選擇只是初步的,還要在詳細(xì)設(shè)計(jì)階段進(jìn)一步修改確定,。
2,、系統(tǒng)性能分析
方案設(shè)計(jì)出來后,盡管各具體結(jié)構(gòu)參數(shù)還沒有確定,也應(yīng)先根據(jù)基本結(jié)構(gòu)形式對(duì)其基本性能進(jìn)行初步分析,。
首先畫出系統(tǒng)方框圖,,列出系統(tǒng)近似傳遞函數(shù),并對(duì)傳遞函數(shù)及方框圖進(jìn)行化簡(jiǎn)(一般應(yīng)簡(jiǎn)化成二階以下系統(tǒng)),,然后在此基礎(chǔ)上對(duì)系統(tǒng)穩(wěn)定性,、精度及快速響應(yīng)性進(jìn)行初步分析,其中最主要的是穩(wěn)定性分析,,如不能滿足設(shè)計(jì)要求,,應(yīng)考慮修改方案或增加校正環(huán)節(jié)。
3,、執(zhí)行元件及傳感器的選擇
方案設(shè)計(jì)只是對(duì)執(zhí)行元件及傳感器進(jìn)行了初步選型,,這一步應(yīng)根據(jù)具體速度、負(fù)載及精度要求來具體確定執(zhí)行元件及傳感器的參數(shù)和型號(hào),。
4,、機(jī)械系統(tǒng)設(shè)計(jì)
機(jī)械系統(tǒng)設(shè)計(jì)包括機(jī)械傳動(dòng)機(jī)構(gòu)及執(zhí)行機(jī)構(gòu)的具體結(jié)構(gòu)及參數(shù)的設(shè)計(jì),設(shè)計(jì)中應(yīng)注意消除各種傳動(dòng)間隙,,盡量提高系統(tǒng)剛度,、減小慣量及摩擦,尤其在設(shè)計(jì)執(zhí)行機(jī)構(gòu)的導(dǎo)軌時(shí)要防止會(huì)產(chǎn)生“爬行”現(xiàn)象,。
5,、控制系統(tǒng)設(shè)計(jì)
控制系統(tǒng)沒計(jì)包括信號(hào)處理及放大電路、校正裝置,、伺服電動(dòng)機(jī)驅(qū)動(dòng)電路等的詳細(xì)設(shè)計(jì),,如果采用計(jì)算機(jī)數(shù)字控制,還應(yīng)包括接口電路及控制器算法軟件的設(shè)計(jì),??刂葡到y(tǒng)設(shè)計(jì)中應(yīng)注意各環(huán)節(jié)參數(shù)的選擇及與機(jī)械系統(tǒng)參數(shù)的匹配,以使系統(tǒng)具有足夠的穩(wěn)定裕度和快速響應(yīng)性,,并滿足精度要求,。
6、系統(tǒng)性能復(fù)查
所有結(jié)構(gòu)參數(shù)確定之后,,可重新列出系統(tǒng)精確的傳遞函數(shù),,但實(shí)際的伺服系統(tǒng)一般都是高階系統(tǒng),因而還應(yīng)進(jìn)行適當(dāng)化簡(jiǎn),,才可進(jìn)行性能復(fù)查,。經(jīng)過復(fù)查如發(fā)現(xiàn)性能不夠理想,則可調(diào)整控制系統(tǒng)的參數(shù)或修改算法,,甚至重新設(shè)計(jì),,直到滿意為止,。
7、系統(tǒng)測(cè)試實(shí)驗(yàn)
上述設(shè)計(jì)與分析都還處于理論階段,,實(shí)際系統(tǒng)的性能,,還需通過測(cè)試實(shí)驗(yàn)來確定。測(cè)試實(shí)驗(yàn)可在模型實(shí)驗(yàn)系統(tǒng)上進(jìn)行,,也可在試制的樣機(jī)上進(jìn)行。通過測(cè)試實(shí)驗(yàn),,往往還會(huì)發(fā)現(xiàn)一些問題,,必須采取措施加以解決。
8,、系統(tǒng)設(shè)計(jì)定案
經(jīng)過上述7個(gè)步驟及其中多次反復(fù)而得到滿意的結(jié)果后,,可以將設(shè)計(jì)方案確定下來,然后整理設(shè)計(jì)圖樣及設(shè)計(jì)計(jì)算說明書等技術(shù)文件,,準(zhǔn)備投入正式生產(chǎn),。
伺服電機(jī)的原理、分類及與步進(jìn)電機(jī)的區(qū)別
什么是伺服電機(jī),?
伺服電動(dòng)機(jī)也可以叫做執(zhí)行電動(dòng)機(jī),,是自動(dòng)控制系統(tǒng)中的執(zhí)行元件,其工作是把收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角速度輸出或者角位移輸出,。
自從伺服電機(jī)推出以來,,伺服電機(jī)已經(jīng)在許多行業(yè)中證明了其相當(dāng)有用。多年來,,伺服電機(jī)一直參與完成大的任務(wù),。它們的尺寸可能很小,但是它們非常強(qiáng)大而且節(jié)能,。有了這些特點(diǎn),,伺服電機(jī)廣泛用于遙控玩具車,飛機(jī),,機(jī)器人和各種工業(yè)設(shè)備,。近年來伺服電機(jī)也被用于工業(yè)應(yīng)用,在線制造工廠,,制藥服務(wù),,機(jī)器人和食品服務(wù)行業(yè)。
伺服電機(jī)有幾種分類,?
有直流伺服電機(jī)和交流伺服電機(jī)兩種分類,,其主要特點(diǎn)是當(dāng)信號(hào)電壓為零時(shí)無自轉(zhuǎn)現(xiàn)象;轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降,。
直流伺服電機(jī)是小型應(yīng)用的理想選擇,,但不能處理大電流浪涌,。然而,交流伺服電機(jī)能夠應(yīng)對(duì)更高的電流浪涌,,并在工業(yè)機(jī)械中得到廣泛的應(yīng)用,。談到價(jià)格,直流電機(jī)比交流伺服更便宜,,所以用得更多,。此外,直流電機(jī)專門設(shè)計(jì)用于連續(xù)旋轉(zhuǎn),,這使其成為機(jī)器人運(yùn)動(dòng)的理想選擇,。
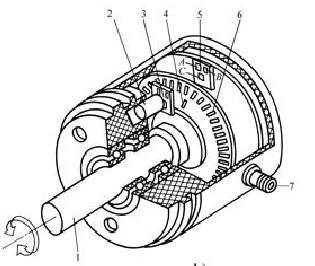
伺服電機(jī)的工作原理
伺服電機(jī)的工作原理比較簡(jiǎn)單,但是其工作比較高效,。伺服電路內(nèi)置在電機(jī)單元內(nèi)部,,它使用一根通常配有齒輪的柔性軸。電信號(hào)控制電機(jī),,也決定軸的移動(dòng)量,。伺服電機(jī)內(nèi)部設(shè)置簡(jiǎn)單:小型直流電機(jī),控制電路和電位器,。直流電機(jī)通過齒輪連接在控制輪上,,當(dāng)電機(jī)轉(zhuǎn)動(dòng)時(shí),電位器的電阻發(fā)生變化,,控制電路能夠精確調(diào)節(jié)運(yùn)動(dòng)和方向,。
當(dāng)軸處于正確的(理想的)位置時(shí),電機(jī)停止供電,。如果軸沒有停在目標(biāo)的位置,,電動(dòng)機(jī)一直運(yùn)轉(zhuǎn),直到進(jìn)入正確的方向,。目標(biāo)的位置通過使用電脈沖的信號(hào)線傳送,。所以,電機(jī)的速度與實(shí)際和理想的位置成正比,。當(dāng)電機(jī)接近所需位置時(shí),,電機(jī)開始緩慢轉(zhuǎn)動(dòng),但電機(jī)轉(zhuǎn)到最遠(yuǎn)時(shí),,轉(zhuǎn)速很快,。換句話說,伺服電機(jī)只需要盡可能快地完成任務(wù),,這使得它們成為高效率的設(shè)備,。
交流伺服電動(dòng)機(jī)在沒有控制電壓時(shí),氣隙中只有勵(lì)磁繞組產(chǎn)生的脈動(dòng)磁場(chǎng),,轉(zhuǎn)子上沒有啟動(dòng)轉(zhuǎn)矩而靜止不動(dòng),。當(dāng)有控制電壓且控制繞組電流和勵(lì)磁繞組電流不同相時(shí),,則在氣隙中產(chǎn)生一個(gè)旋轉(zhuǎn)磁場(chǎng)并產(chǎn)生電磁轉(zhuǎn)矩,使轉(zhuǎn)子沿旋轉(zhuǎn)磁場(chǎng)的方向旋轉(zhuǎn),。但是對(duì)伺服電動(dòng)機(jī)要求不僅是在控制電壓作用下就能啟動(dòng),,且電壓消失后電動(dòng)機(jī)應(yīng)能立即停轉(zhuǎn)。如果伺服電動(dòng)機(jī)控制電壓消失后像一般單相異步電動(dòng)機(jī)那樣繼續(xù)轉(zhuǎn)動(dòng),,則出現(xiàn)失控現(xiàn)象,,我們把這種因失控而自行旋轉(zhuǎn)的現(xiàn)象稱為自轉(zhuǎn)。
傳統(tǒng)直流伺服電動(dòng)機(jī)的基本工作原理與普通直流電動(dòng)機(jī)完全相同,,依靠電樞電流與氣隙磁通的作用產(chǎn)生電磁轉(zhuǎn)矩,,使伺服電動(dòng)機(jī)轉(zhuǎn)動(dòng)。通常采用電樞控制方式,,即在保持勵(lì)磁電壓不變的條件下,通過改變電樞電壓來調(diào)節(jié)轉(zhuǎn)速,。電樞電壓越小,,則轉(zhuǎn)速越低;電樞電壓為零時(shí),,電動(dòng)機(jī)停轉(zhuǎn),。由于電樞電壓為零時(shí)電樞電流也為零,電動(dòng)機(jī)不產(chǎn)生電磁轉(zhuǎn)矩,,不會(huì)出現(xiàn)“自轉(zhuǎn)”,。
伺服電機(jī)步進(jìn)電機(jī)的區(qū)別
1.伺服是高速低扭矩,步進(jìn)是低速大扭矩
一般說來,,伺服輕輕松松都能達(dá)到幾千的額定轉(zhuǎn)速,。比如小功率伺服,也就是750W以內(nèi)的伺服,,日系伺服額定3000轉(zhuǎn),,而歐系伺服甚至能到5000轉(zhuǎn),6000轉(zhuǎn),。而步進(jìn),,由于自身的特性,一般也就五六百轉(zhuǎn),。但是它的扭矩卻比同規(guī)格的伺服大很多,,大到都可以省略減速機(jī)了。其實(shí)步進(jìn)是很少加減速機(jī)的,,就幾百的轉(zhuǎn)速,,再加個(gè)減速機(jī),那可真沒什么用了,。
2.伺服法蘭是整的,,步進(jìn)法蘭不是整的
伺服的法蘭都是10的倍數(shù),,比如40,60,,80,,110,180等,,而步進(jìn)一般是42,,57,86等,,經(jīng)常在工程現(xiàn)場(chǎng)聽到42步進(jìn),,57步進(jìn)就是指法蘭尺寸。步進(jìn)和伺服的法蘭不是一個(gè)系列,,這也是區(qū)分伺服還是步進(jìn)的一個(gè)重要因素,。
3.伺服的加速時(shí)間可以忽略,步進(jìn)不能忽略
伺服的加速時(shí)間只有幾毫秒,,完全可以忽略不計(jì),,而步進(jìn)電機(jī)的加速時(shí)間,有幾百毫秒,,不要小看這點(diǎn)差距,,雖然我們用直覺感受不出來,但是它卻對(duì)機(jī)械設(shè)備的節(jié)拍有著至關(guān)重要的影響,。
4.伺服過載能力強(qiáng),,步進(jìn)幾乎沒有過載能力
伺服電機(jī)一般都有過載能力看比如180%,300%等,,而步進(jìn)幾乎沒有什么過載能力,。
5.伺服價(jià)格高,步進(jìn)便宜
這個(gè)就不說了,,如果單單算重量,,步進(jìn)和廢銅爛鐵價(jià)格差不多了,而伺服,,相對(duì)來說價(jià)格很高,。步進(jìn)主要用于速度不高,不頻繁啟停的場(chǎng)合,,特別是安裝空間狹小的地方,,甚至,我們可以把步進(jìn)當(dāng)做氣缸看待,。而伺服,,用的場(chǎng)合顯然比步進(jìn)更廣泛,比如頻繁啟停,,各種高速設(shè)備等,。