關于傳感器的分辨率與精度的理解,,可以用我們所用的機械三指針式手表打這樣一個比喻:時針的分辨率是小時,,分針的分辨率是分,秒針的分辨率是秒,,眼睛反應快的,,通過秒針在秒間的空格,,我們甚至能分辨至約0.3秒,,這是三針式機械指針手表都可以做到的;而精度是什么,,就是每個手表對標準時間的準確性,,這是每個手表都不同的,或者在使用的不同時間里都不同的(越走越快的或越走越慢的),,大致在1秒至30秒之間,。
同樣的,在旋轉編碼器的使用中,,分辨率與精度是完全不同的兩個概念,。
編碼器的分辨率,是指編碼器可讀取并輸出的最小角度變化,,對應的參數(shù)有:每轉刻線數(shù)(line),、每轉脈沖數(shù)(PPR)、最小步距(Step),、位(Bit)等,。
編碼器的精度,是指編碼器輸出的信號數(shù)據(jù)對測量的真實角度的準確度,,對應的參數(shù)是角分(′),、角秒(″)。
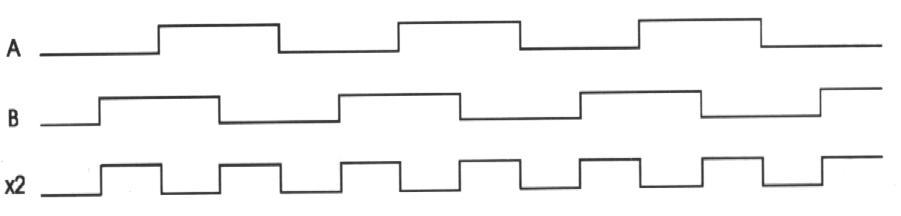
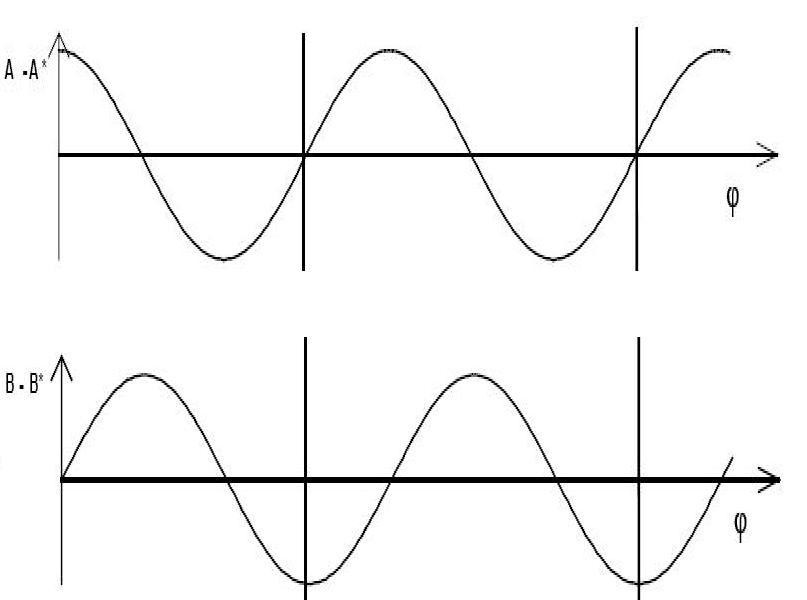
分辨率:線(line),,就是編碼器的碼盤的光學刻線,,如果編碼器是直接方波輸出的,它就是每轉脈沖數(shù)(PPR)了(圖1), 但如果是正余弦(sin/cos)信號輸出的,,是可以通過信號模擬量變化電子細分,,獲得更多的方波脈沖PPR輸出(圖2),編碼器的方波輸出有A相與B相,,A相與B相差1/4個脈沖周期,,通過上升沿與下降沿的判斷,就可以獲得1/4脈沖周期的變化步距(4倍頻),,這就是最小測量步距(Step)了,,所以,嚴格地講,,最小測量步距就是編碼器的分辨率,。
旋轉編碼器的精度,,以角分,、角秒為單位,,與分辨率有一點關系,又不是全部,,實際上,,影響編碼器精度的有以下4個部分:
1:光學部分
2:機械部分
3:電氣部分
4:使用中的安裝與傳輸接收部分,使用后的精度下降,,機械部分自身的偏差,。
1)編碼器光學部分對精度的影響:
光學碼盤—主要的是母板精度、每轉刻線數(shù),、刻線精度,、刻線寬度一致性、邊緣精整性等,。
光發(fā)射源—光的平行與一致性,、光衰減。
光接收單元—讀取夾角,、讀取響應,。
光學系統(tǒng)使用后的影響—污染,衰減,。
例如光學碼盤,首先是母板的刻線精度,海德漢的母板是全世界公認第一的,據(jù)說其是在地下幾十米雙懸浮工作室內加工的,,對于外界各種因素的影響減小到最小,甚至要考慮到海浪的次聲波和遠處汽車引擎的振動,,為此,,很多編碼器廠家甚至向海德漢購買母板。其次,,加工的過程,,光學成像的時間,溫度,,物理化學的變化,,污染等,都會影響到碼盤刻線的寬度和邊緣性,。所以,,即使是一樣的碼盤刻線數(shù),各家能做到的精度也是不同的,。
2)編碼器機械部分對精度的影響:
軸的加工精度與安裝精度,。
軸承的精度與結構精度。
碼盤安裝的同心度,,光學組建安裝的精度,。
安裝定位點與軸的同心度。
例如,,就軸承的結構而言,,單軸承支撐結構的軸承偏差無法消除,,而且經(jīng)使用后偏差會更大,而雙軸承結構或多支承結構,,可有效降低單個軸承的偏差,。
3)編碼器電氣部分對精度的影響:
電源的穩(wěn)定精度—對光發(fā)射源與接收單元的影響。
讀取響應與電氣處理電路帶來的誤差,;
電氣噪音影響,,取決于編碼器電氣系統(tǒng)的抗干擾能力;
例如,,如果電子細分,,也會帶來的誤差,按照德國海德漢提供的介紹,,海德漢編碼器的細分電氣誤差與正余弦曲線的誤差約在原始刻線寬度的1%左右,。
4)編碼器使用中帶來的精度影響:
安裝時與測量轉軸連接的同心度;
輸出電纜的抗干擾與信號延遲(較長距離或較快頻率下),;
接收設備的響應與接收設備內部處理可能的誤差,。
編碼器高速旋轉時的動態(tài)響應偏差。
最常見的是我們自己使用安裝的方法與安裝結果的偏差,。
細分技術對分辨率與精度的影響
細分技術將電壓或電流式正余弦波信號分割轉換成為方波信號,,可用于一般正余弦波信號輸出的傳感器
細分電路對于A/B相波形量的變化,判斷出相位角,,并再次分割出更細的方波脈沖輸出,,同樣提供1/4周期差的A’/B’兩相和Z’相,A’/B’相可以繼續(xù)的4倍頻,。
事實上對于細分后的編碼器來說,,其細分前的刻線數(shù)很重要,而其細分前的系統(tǒng)精度更加重要,,細分可以提高分辨率,,但不能提高精度,甚至可能降低了精度,。
那么為什么我們有時候感到細分后,,對于加工精度是提高的呢?
這里有幾個因素:
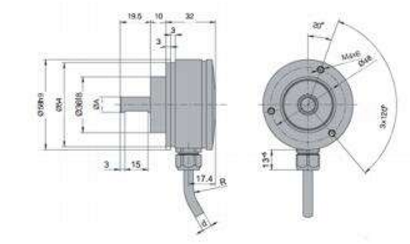
1. 細分前,,精度遠優(yōu)于分辨率,,細分后可以將精度用的更充分,例如前面介紹的ROD486,,細分前3600刻線,,分辨度(Step)步距為0.025度,按照±1步距來看,其使用精度僅達到0.05度,,而精度為18角秒,,細分后,在18角秒前,,是可以提高精度的使用的,但如果細分倍數(shù)再高,,其使用精度就無法超越18角秒,。
2. 目前大部分的運動控制是用速度環(huán)控制的,細分提高了分辨率,,可以提高速度環(huán)的精度,,帶來的最終加工效果看,似乎也是精度提高了,。
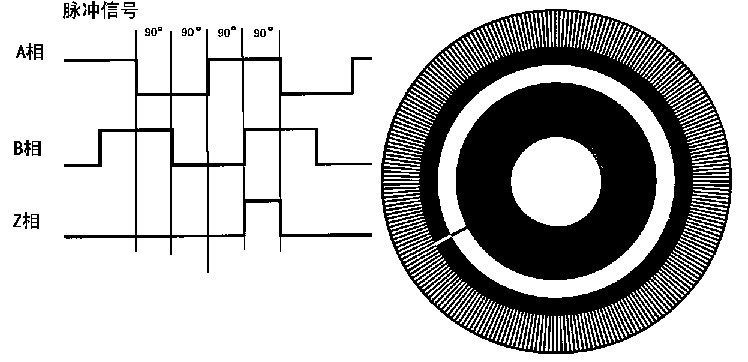
高分辨率的編碼器,,精度不一定就高,以某日系17位編碼器為例,,其原始最高刻線為8位256線(如圖3),,經(jīng)過多倍細分和A/B相4倍頻后,得到17位(約13萬圓周分割度)的分辨率,,折算角度分辨率為9.89角秒,,可其并沒有提供精度參數(shù),如以業(yè)內精度較高的海德漢提供的方法推算,,編碼器系統(tǒng)原始精度(誤差)為刻線(512)的1/20,,細分誤差為原始刻線(512)的1%計算,得到的精度為152角秒—相當于2.5角分,,如此的精度,,證實這樣的高分辨率編碼器主要是應用于速度環(huán)的,對于定位的位置環(huán),,精度并不高,。事實上對于細分后的編碼器來說,其細分前的刻線數(shù)很重要,,而其細分前的系統(tǒng)精度更加重要,,細分可以提高分辨率,但不能提高精度,,甚至可能降低了精度,。
綜上所述,影響編碼器精度的因素很多,,編碼器的精度與分辨率相關的,,僅僅是光學部分的刻線數(shù),刻線數(shù)越多(越密),,精度可能越高,,但還要看其余的很多部分,,都與分辨率無關。而刻線數(shù)密度,,也是受材料與加工工藝及光學衍射的限制的,,一般58毫米外徑工業(yè)級編碼器的刻線數(shù)最高到10000線,更高的分辨率均由正余弦信號細分來完成的,,其精度也就受到了一定的限制,。