選擇正確的伺服電機步驟是什么?解析伺服電機驅(qū)動器的優(yōu)點,!
伺服電機驅(qū)動器是現(xiàn)代自動化系統(tǒng)中不可或缺的元件,其優(yōu)點多種多樣,,包括高速性能,、快速的動態(tài)響應、高精度控制,、降低發(fā)熱和噪音,、強大的適應性以及穩(wěn)定的低速運行。下面將詳細解釋伺服電機驅(qū)動器的這些優(yōu)點:
高速性能: 伺服電機驅(qū)動器具有出色的高速性能,,通常能夠達到每分鐘2000到3000轉(zhuǎn)的額定轉(zhuǎn)速,。這使它們非常適合需要高速運動的應用,如生產(chǎn)線上的定位和調(diào)整任務,。
及時性:?伺服電機的動態(tài)響應非常迅速,,通常在幾十毫秒內(nèi)就能夠加速或減速。這種迅速的響應時間使它們適用于需要快速調(diào)整和精確控制的任務,,如機器人操作和飛行器姿態(tài)控制,。
精度: 伺服電機驅(qū)動器實現(xiàn)了位置,、速度和力矩的閉環(huán)控制,克服了傳統(tǒng)步進電機失步的問題,。這種精確的控制使其適用于需要高精度定位和運動的應用,,如 CNC 加工和醫(yī)療設(shè)備。
舒適性: 伺服電機驅(qū)動器相對于傳統(tǒng)的電機系統(tǒng),,通常具有更低的發(fā)熱和噪音水平,。這降低了工作環(huán)境的溫度和噪音水平,提高了操作員的舒適性,。
適應性: 伺服電機驅(qū)動器具有出色的抗過載能力,,能夠承受三倍于額定轉(zhuǎn)矩的負載。這使它們適用于那些需要瞬時負載波動和需要快速啟動的應用,,如飛行器起飛和著陸,。
穩(wěn)定性: 伺服電機在低速運行時表現(xiàn)出色,不會出現(xiàn)步進電機常見的步進運動現(xiàn)象,。這使它們適用于需要高速響應的應用,,如攝像機跟蹤和醫(yī)療設(shè)備。
伺服電動機的控制原理圖
伺服電機系統(tǒng)的控制原理圖包括以下關(guān)鍵組件:
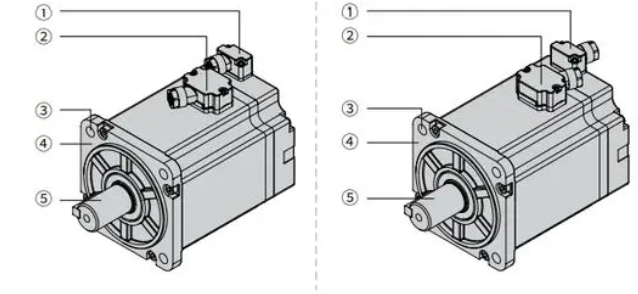
伺服電機(M): 伺服電機是整個驅(qū)動系統(tǒng)的動力來源,。它負責產(chǎn)生機械運動,,根據(jù)控制信號調(diào)整轉(zhuǎn)速和位置,。
運算放大器: 運算放大器(例如LM675)是伺服控制電路中的關(guān)鍵放大器部件,用于提供驅(qū)動電流以控制伺服電機的運動,。它接收輸入信號并輸出電流來控制電機的動作,。
速度指令電位器(RP1): 速度指令電位器用于設(shè)置運算放大器的基準電壓,即速度設(shè)定,。通過調(diào)整這個電位器,,可以控制伺服電機的目標速度。
放大器增益調(diào)整電位器(RP2): 這兩個電位器用于微調(diào)運算放大器的增益和速度反饋信號的大小,。它們可以幫助調(diào)整系統(tǒng)的性能,,以適應不同的應用要求。
反饋信號產(chǎn)生器: 反饋信號產(chǎn)生器測量電機的實際速度,,并將反饋信號發(fā)送回運算放大器,。這有助于系統(tǒng)實時調(diào)整電機的運動,以確保它與預定速度保持一致,。
伺服電機的選型步驟
選擇適當?shù)乃欧姍C對于系統(tǒng)的性能至關(guān)重要,。以下是選擇伺服電機的步驟:
計算負載慣量: 首先,需要根據(jù)應用的要求計算負載機構(gòu)的慣量,。慣量通常與機構(gòu)的質(zhì)量和幾何形狀有關(guān),。
明確運動條件: 確定負載機構(gòu)的運動條件,包括加速度,、運動速度,、機構(gòu)的重量和運動方式(水平、垂直旋轉(zhuǎn)等),。
選擇伺服電機規(guī)格: 根據(jù)負載慣量和伺服電機的慣量初步選擇合適的伺服電機規(guī)格,。
計算負載轉(zhuǎn)矩: 根據(jù)負載的重量、摩擦系數(shù),、配置方式和運行效率等因素計算出負載轉(zhuǎn)矩,。
計算加速和減速轉(zhuǎn)矩: 結(jié)合初選的伺服電機的慣量和負載的慣量,計算出加速和減速轉(zhuǎn)矩,,確保伺服電機能夠應對快速變化的負載,。
驗證伺服電機功率: 選定的伺服電機的大輸出轉(zhuǎn)矩必須大于加速和減速轉(zhuǎn)矩之和,否則需要選擇功率更大的伺服電機,。
驗證伺服電機額定轉(zhuǎn)矩: 選定的伺服電機的額定轉(zhuǎn)矩必須大于系統(tǒng)的連續(xù)瞬時轉(zhuǎn)矩需求,。如果不符合條件,需要選擇更適合的伺服電機規(guī)格,。
計算連續(xù)瞬時轉(zhuǎn)矩: 根據(jù)負載的轉(zhuǎn)矩,、加速轉(zhuǎn)矩、減速轉(zhuǎn)矩和保持轉(zhuǎn)矩,,計算出系統(tǒng)的連續(xù)瞬時轉(zhuǎn)矩需求,。
最終選擇: 最終確定伺服電機的規(guī)格,,確保它的性能符合系統(tǒng)要求。
綜上所述,,伺服電機的選擇是一個復雜的過程,,需要綜合考慮眾多因素,包括負載的性質(zhì),、運動條件,、加速度、轉(zhuǎn)矩需求以及伺服電機的規(guī)格和性能,。通過仔細的計算和驗證,可以確保所選伺服電機能夠滿足應用的要求,,實現(xiàn)精確的運動控制和高效的自動化系統(tǒng),。這些步驟有助于工程師們在伺服電機選擇過程中做出明智的決策,確保系統(tǒng)的可靠性和性能,。