如何檢修電梯編碼器才能減少維修故障,?影響編碼器速度檢測的因素分析,!
編碼器有兩個主要功能就是測速和測角度,,應(yīng)用非常廣泛,。今天我們重點說一說編碼器在電梯中的應(yīng)用,,一是控制電機上升和下降的運行速度,,二是控制電梯在每層停止時的位置,。但是在現(xiàn)實的應(yīng)用中,電梯經(jīng)常在空中拋錨,,很可能與編碼器故障有關(guān),,那么就需要對編碼器進(jìn)行定期檢修了。
如果電梯編碼器發(fā)生故障,,首先可以自己按操作說明進(jìn)行簡單排查,,當(dāng)然,需要事先掌握相關(guān)知識,,掌握確認(rèn)故障的方式方法,。

1,、可以通過基本的排除方法來判斷:排除方法用于判斷電梯編碼器是否存在缺陷,在評估過程中每個人都必須遵循電梯編碼器的工作原理,。
2,、判斷機械偏差是否累計誤差的方法,如果沒有錯誤,,問題基本上可以排除,,可以考慮其他方面。
3,、是判斷控制系統(tǒng)和編碼器之間的電路接口是否一致的方法,,在判斷電梯編碼器是否有問題時,可以確認(rèn)端口的狀態(tài)進(jìn)行判斷,。
4,、與正常運行的電梯編碼器進(jìn)行比較,如果電梯編碼器與正常的編碼器相比有很大差距,,那就意味著這個的電梯編碼器有問題,。在使用它的之前一定要進(jìn)行檢修,疏于維護(hù)會嚴(yán)重影響電梯的后續(xù)使用,。
以上這些關(guān)于電梯編碼器的方式,,都是電梯維護(hù)人員長時間的總結(jié)??偨Y(jié)這些基本內(nèi)容的目的是讓每個人都能判斷電梯編碼器是否發(fā)生故障,。發(fā)生相關(guān)故障后,應(yīng)及時維修,,以免影響電梯使用,。
影響編碼器速度檢測的因素有哪些?
編碼器速度測量可能受到各種設(shè)備誤差的影響,包括設(shè)備誤差,、相位誤差和插值誤差,。
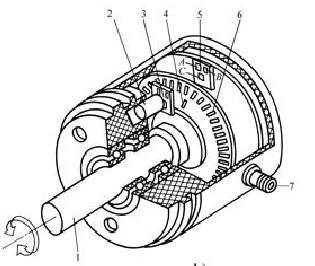
設(shè)備誤差包括編碼器中的機械缺陷和編碼器或標(biāo)線上的刻度誤差。與儀器相關(guān)的誤差包括基板的平整度,、傳感器的定位精度以及編碼器和電機軸之間同心度的一致性。
相位誤差是由脈沖或測量值之間缺乏信息傳遞引起的,。正交編碼器僅讀取一個或兩個通道(A和B)上的信號邊緣,,并且不在這些讀數(shù)之間傳輸信息。相位誤差僅為±1/2或計算固定測量步長,。
只有當(dāng)編碼器的分辨率超過正交編碼器的固有X4解碼電子器件時,,才會發(fā)生插值誤差。插值誤差隨著速度的增加而增加,。使用具有更多行數(shù)或更多窗口的編碼器可以減少插值和相位誤差,。
哪些因素影響編碼器精度?
編碼器的分辨率取決于編碼器瞄準(zhǔn)鏡(增量編碼器)或編碼器碼盤模式(值編碼器)的數(shù)量,。處理編碼器后,,不能添加雕刻線或代碼的數(shù)量。然而,,增量編碼器可以通過信號分離來提高分辨率,。
編碼器如何測量速度?
當(dāng)使用旋轉(zhuǎn)編碼器時,,角度或線性距離測量是一個重要方面,,它也可以用于速度或線性速度測量。如果編碼器旋轉(zhuǎn)得更快,,脈沖速率將以相同的速度增加,。編碼器的速度可以通過兩種方法確定:脈沖計數(shù)或脈沖時間測量。
增量編碼器通常在兩個通道上輸出信號,,通常稱為“A”和“B”,,在兩個相位之間偏移90°。旋轉(zhuǎn)方向可以由哪個通道先來確定,。通常,,當(dāng)通道A在前面時,方向為順時針,;如果通道B在前面,,則方向為逆時針。正交輸出還允許通過使用X2或X4解碼技術(shù)來提高編碼器的分辨率,。在X2解碼期間,,信道A的上升沿和下降沿被計數(shù),每轉(zhuǎn)計數(shù)的脈沖數(shù)加倍,從而使編碼器分辨率加倍,。X4解碼對通道A和B的上升沿和下降沿進(jìn)行計數(shù),,將分辨率提高四倍。
編碼器速度測量可能受到各種設(shè)備誤差的影響,,包括設(shè)備誤差,、相位誤差和插值誤差。設(shè)備誤差包括編碼器中的機械缺陷和編碼器或標(biāo)線上的刻度誤差,。與儀器相關(guān)的誤差包括基板的平整度,、傳感器的定位精度以及編碼器和電機軸之間同心度的一致性。
相位誤差是由脈沖或測量值之間缺乏信息傳遞引起的,。正交編碼器僅讀取一個或兩個通道(A和B)上的信號邊緣,,并且不在這些讀數(shù)之間傳輸信息。相位誤差僅為±1/2或計算固定測量步長,。
只有當(dāng)編碼器的分辨率超過正交編碼器的固有X4解碼電子器件時,,才會發(fā)生插值誤差。插值誤差隨著速度的增加而增加,。使用具有更多行數(shù)或更多窗口的編碼器可以減少插值和相位誤差,。