編碼器是怎么影響生產(chǎn)效益的,?絕對(duì)值編碼器對(duì)多種馬達(dá)的控制分析,!
對(duì)于一臺(tái)生產(chǎn)設(shè)備來(lái)說(shuō),,編碼器的成本簡(jiǎn)直微不足道,市面上便宜的編碼器幾百元,,貴的幾千元甚至上萬(wàn)元,,看上去好幾十倍,也不過(guò)相當(dāng)多萬(wàn)把塊錢(qián)的差價(jià)而已,,就算數(shù)量再多,,和設(shè)備產(chǎn)線的成本來(lái)比,簡(jiǎn)直是九牛一毛,。 那么這看上去微不足道的部分,,不同類(lèi)型的編碼器的選擇,會(huì)對(duì)設(shè)備的性能和生產(chǎn)效益有什么影響,,這就是我們討論的話題,。 適用于單獨(dú)使用的編碼器,也適用于伺服電機(jī)自帶的編碼器反饋,。
增量型編碼器的編碼是通過(guò)在運(yùn)動(dòng)中發(fā)送脈沖累加的,,在斷電后是無(wú)法記憶位置的,,在重新上電后,編碼器數(shù)值永遠(yuǎn)從零開(kāi)始記錄,。 因此,,對(duì)于使用增量型編碼器的設(shè)備,需要在設(shè)備上電開(kāi)機(jī)后進(jìn)行編碼器回原點(diǎn)的初始化操作,,通常這樣的動(dòng)作就是手動(dòng)操作讓編碼器工位慢速找到基準(zhǔn)位置(比如限位),。這個(gè)技術(shù)上稱(chēng)為“homing”“尋參”“回零”...... 可想而知,這樣的操作是影響設(shè)備開(kāi)機(jī)時(shí)間的,,每次設(shè)備開(kāi)機(jī)時(shí)都需要消耗幾分鐘時(shí)間開(kāi)始正常生產(chǎn),。
打個(gè)比方,設(shè)備產(chǎn)能是1000元/分鐘,,每次開(kāi)機(jī)回原點(diǎn)操作需要5分鐘,,設(shè)備每年各種斷電開(kāi)機(jī)20次(包括維修和故障等),那么在設(shè)備初始化的操作上,,就是每年10萬(wàn)元的花費(fèi),。 是不是很?chē)樔耍?/p>
所以,通常在有限行程范圍內(nèi)的往復(fù)運(yùn)動(dòng)位置測(cè)量反饋盡量不使用增量型編碼器,,而采用***型位置反饋,。***型編碼器的位置編碼是通過(guò)編碼器內(nèi)部電路基于位置直接獲得的,不依賴(lài)于外部電源,,因此其斷電后依然可以測(cè)量和讀取位置值,,只是因?yàn)橄到y(tǒng)斷電,,其無(wú)法將編碼反饋給設(shè)備系統(tǒng)。 那么是不是使用***型編碼器,,就可以省去設(shè)備回原點(diǎn)初始化動(dòng)作了呢,? 那還要看***型編碼器的圈數(shù)。如果使用的***型編碼器圈數(shù)無(wú)法覆蓋運(yùn)動(dòng)行程,,那么上面的初始化動(dòng)作并不能省略,。所以很多時(shí)候,使用單圈***值編碼器和增量型編碼器在這上面并沒(méi)有太大區(qū)別,。
是否需要電池 ***值型編碼器能夠不依賴(lài)外部電源記錄編碼,,有時(shí)是需要借助電池的,。然而電池壽命就稱(chēng)為經(jīng)常被詬病的部分,。編碼器電池如果沒(méi)電了,那么***型編碼器就和增量的沒(méi)啥區(qū)別了,。換電池的過(guò)程必然是影響設(shè)備生產(chǎn)的,,只是其發(fā)生的頻次可能并不高,比如一年換一次電池,。但每次更換的時(shí)間就很不確定了,,更換編碼器電池本身并不麻煩,麻煩的是從庫(kù)存里找備件電池的過(guò)程,。而且電池是很難備的,,因?yàn)閭}(cāng)庫(kù)里放很久的電池很電量如何也是個(gè)問(wèn)題。
還是用剛才的例子,,設(shè)備產(chǎn)能是1000元/分鐘,,每次更換電池需要15分鐘(包括從倉(cāng)庫(kù)領(lǐng)備件的時(shí)間),電池每年更換一次,,那么更換電池操作上,,就是每年每臺(tái)編碼器 1.5萬(wàn)元的花費(fèi)。所以,,壽命長(zhǎng),、性能佳的編碼器電池真的是很貴的。 于是,,現(xiàn)在有些***型編碼器是不需要使用電池的,,主要是一些正余弦編碼器,如:EnDat/Hiperface Steggman,,這樣就再也不用考慮電池壽命的問(wèn)題了,。
當(dāng)然,通常這樣的編碼器也不便宜的,。 所以,,別小看微不足道的小部件,,看似不大的變化,涉及金額也不大,,可是卻對(duì)產(chǎn)能效益影響不小,。在我們的生產(chǎn)設(shè)備中,這樣的小部件的還有不少,,我們以后慢慢聊,。 ps:上面說(shuō)使用了***型編碼器,可以減少在設(shè)備斷電開(kāi)機(jī)后設(shè)備運(yùn)行前的回原點(diǎn)初始化工作,,但并不意味著設(shè)備不需要有回原點(diǎn)功能,。因?yàn)椋?dāng)設(shè)備傳動(dòng)部件拆解重新組裝后(如在整修時(shí)),,編碼器記錄編碼和機(jī)械實(shí)際坐標(biāo)的相對(duì)位置就丟失了,,需要在調(diào)試開(kāi)機(jī)時(shí)重新做初始化。
絕對(duì)值編碼器可以對(duì)多種馬達(dá)進(jìn)行控制
絕對(duì)值編碼器,,用于檢測(cè)(檢查并測(cè)試)旋轉(zhuǎn)運(yùn)動(dòng)系統(tǒng)的位置和速度,。絕對(duì)值編碼器可以對(duì)多種馬達(dá)控制應(yīng)用實(shí)現(xiàn)閉環(huán)控制,諸如開(kāi)關(guān)磁阻電機(jī)和交流感應(yīng)電機(jī),。
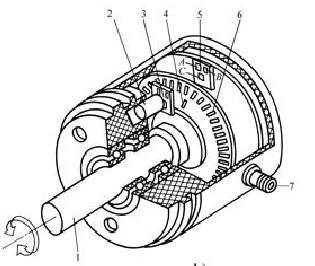
典型的絕對(duì)值編碼器包括一個(gè)放置在馬達(dá)傳動(dòng)軸上的開(kāi)槽的輪子和一個(gè)用于檢測(cè)(檢查并測(cè)試)該輪上槽口的發(fā)射器/檢測(cè)器模塊,。絕對(duì)值編碼器廣泛應(yīng)用于水利、輕工,、機(jī)械,、冶金、紡織,、石油,、航空、航海等行業(yè),。具體到工程項(xiàng)目類(lèi)如:回轉(zhuǎn)臺(tái),、閘門(mén)開(kāi)度、閥門(mén)開(kāi)度,、提升機(jī)吊車(chē)定位,、行車(chē)定位、物位測(cè)量,、導(dǎo)彈發(fā)射角度定位,、導(dǎo)彈空氣舵測(cè)量、電子經(jīng)緯儀等高精度測(cè)量定位場(chǎng)合,。通常,,有三個(gè)輸出,分別為:A相,、B相和索引,,所提供的信息可被接收,,用以提供有關(guān)電機(jī)軸的運(yùn)動(dòng)信息,包括距離和方向,。
A相和B相這兩個(gè)通道間的關(guān)系是惟一的,。絕對(duì)值編碼器碼值"跟被測(cè)"位置"對(duì)應(yīng)是唯一的,具有"斷電記憶"功能,,無(wú)旋轉(zhuǎn)測(cè)量積累誤差,,在"一個(gè)循環(huán)"內(nèi)用于測(cè)控領(lǐng)域比增量編碼器優(yōu)越,可加前減速箱調(diào)節(jié)量程,。如果A相超前B相,,那么電機(jī)的旋轉(zhuǎn)方向被認(rèn)為是正向的。如果A相落后B相,,那么電機(jī)的旋轉(zhuǎn)方向則被認(rèn)為是反向的,。第三個(gè)通道稱(chēng)為索引脈沖,每轉(zhuǎn)一圈產(chǎn)生一個(gè)脈沖,,作為基準(zhǔn)用來(lái)確定絕對(duì)位置,。編碼器產(chǎn)生的正交信號(hào)可以有四種各不相同的狀態(tài),。請(qǐng)注意,,當(dāng)旋轉(zhuǎn)的方向改變時(shí),這些狀態(tài)的順序與此相反,。編碼器捕捉相位信號(hào)和索引脈沖,,并將信息轉(zhuǎn)換為位置脈沖的數(shù)字計(jì)數(shù)值。通常,,當(dāng)傳動(dòng)軸向某一個(gè)方向旋轉(zhuǎn)時(shí),,該計(jì)數(shù)值將遞增計(jì)數(shù);而當(dāng)傳動(dòng)軸向另一個(gè)方向旋轉(zhuǎn)時(shí),,則遞減計(jì)數(shù),。選擇;x4 ;測(cè)量模式,QEI邏輯在A相和B相輸入信號(hào)的上升沿和下降沿都使位置計(jì)數(shù)器計(jì)數(shù),,可以為確定編碼器位置提供更高精度的數(shù)據(jù),。
絕對(duì)值編碼器接口模塊提供了與增量式編碼器的接口。增量型編碼器編碼器是把角位移或直線位移轉(zhuǎn)換成電信號(hào)的一種裝置,。前者稱(chēng)為碼盤(pán),,后者稱(chēng)碼尺.按照讀出方式編碼器可以分為接觸式和非接觸式兩種.接觸式采用電刷輸出,一電刷接觸導(dǎo)電區(qū)或絕緣區(qū)來(lái)表示代碼的狀態(tài)是"1"還是"0",;非接觸式的接受敏感元件是光敏元件或磁敏元件,,采用光敏元件時(shí)以透光區(qū)和不透光區(qū)來(lái)表示代碼的狀態(tài)是"1"還是"0"。QEI由對(duì)A相和B相信號(hào)進(jìn)行解碼的解碼邏輯以及用于累計(jì)計(jì)數(shù)值的遞增/遞減計(jì)數(shù)器組成,。