關(guān)于伺服電機的使用有哪些關(guān)鍵問題?伺服系統(tǒng)的基本要求及特點,!
工業(yè)機器人電動伺服系統(tǒng)的一般結(jié)構(gòu)為三個閉環(huán)控制,,即電流環(huán)、速度環(huán)和位置環(huán),。一般情況下,,對于交流伺服驅(qū)動器,可通過對其內(nèi)部功能參數(shù)進行人工設(shè)定而實現(xiàn)位置控制,、速度控制,、轉(zhuǎn)矩控制等多種功能。
01 如何正確選擇伺服電機和步進電機,?
主要視具體應(yīng)用情況而定,,簡單地說要確定:負載的性質(zhì)(如水平還是垂直負載等),轉(zhuǎn)矩,、慣量,、轉(zhuǎn)速,、精度、加減速等要求,,上位控制要求(如對端口界面和通訊方面的要求),,主要控制方式是位置、轉(zhuǎn)矩還是速度方式,。供電電源是直流還是交流電源,,或電池供電,電壓范圍,。據(jù)此以確定電機和配用驅(qū)動器或控制器的型號,。
02 選擇步進電機還是伺服電機系統(tǒng),?
其實,選擇什么樣的電機應(yīng)根據(jù)具體應(yīng)用情況而定,,各有其特點,。
03 如何配用步進電機驅(qū)動器?
根據(jù)電機的電流,,配用大于或等于此電流的驅(qū)動器,。如果需要低振動或高精度時,可配用細分型驅(qū)動器,。對于大轉(zhuǎn)矩電機,,盡可能用高電壓型驅(qū)動器,以獲得良好的高速性能,。
04 2相和5相步進電機有何區(qū)別,,如何選擇?
2相電機成本低,,但在低速時的震動較大,,高速時的力矩下降快。5相電機則振動較小,,高速性能好,,比2相電機的速度高30~50%,可在部分場合取代伺服電機,。
05 何時選用直流伺服系統(tǒng),它和交流伺服有何區(qū)別,?
直流伺服電機分為有刷和無刷電機,。
有刷電機成本低、結(jié)構(gòu)簡單,、啟動轉(zhuǎn)矩大,、調(diào)速范圍寬,、控制容易、需要維護,,但維護方便(換碳刷),、產(chǎn)生電磁干擾、對環(huán)境有要求,。因此它可以用于對成本敏感的普通工業(yè)和民用場合,。
無刷電機體積小、重量輕,、出力大,、響應(yīng)快、速度高,、慣量小,、轉(zhuǎn)動平滑、力矩穩(wěn)定,??刂茝?fù)雜,容易實現(xiàn)智能化,,其電子換相方式靈活,,可以方波換相或正弦波換相。電機免維護,,效率很高,,運行溫度低,電磁輻射很小,,長壽命,,可用于各種環(huán)境。
交流伺服電機也是無刷電機,,分為同步和異步電機,,目前運動控制中一般都用同步電機,它的功率范圍大,,可以做到很大的功率,。大慣量,最高轉(zhuǎn)動速度低,,且隨著功率增大而快速降低,。因而適合做低速平穩(wěn)運行的應(yīng)用。
06 使用電機時要注意的問題,?
上電運行前要作如下檢查:
電源電壓是否合適(過壓很可能造成驅(qū)動模塊的損壞),;對于直流輸入的+/-極性一定不能接錯,驅(qū)動控制器上的電機型號或電流設(shè)定值是否合適(開始時不要太大),;
控制信號線接牢靠,,工業(yè)現(xiàn)場最好要考慮屏蔽問題(如采用雙絞線),;
不要開始時就把需要接的線全接上,只連成最基本的系統(tǒng),,運行良好后,,再逐步連接。
一定要搞清楚接地方法,,還是采用浮空不接,。
開始運行的半小時內(nèi)要密切觀察電機的狀態(tài),如運動是否正常,,聲音和溫升情況,,發(fā)現(xiàn)問題立即停機調(diào)整。
07 步進電機啟動運行時,,有時動一下就不動了或原地來回動,,運行時有時還會失步,是什么問題,?
一般要考慮以下方面作檢查:
電機力矩是否足夠大,,能否帶動負載,因此我們一般推薦用戶選型時要選用力矩比實際需要大50%~100%的電機,,因為步進電機不能過負載運行,,哪怕是瞬間,都會造成失步,,嚴(yán)重時停轉(zhuǎn)或不規(guī)則原地反復(fù)動,。
上位控制器來的輸入走步脈沖的電流是否夠大(一般要>10mA),以使光耦穩(wěn)定導(dǎo)通,,輸入的頻率是否過高,,導(dǎo)致接收不到,如果上位控制器的輸出電路是CMOS電路,,則也要選用CMOS輸入型的驅(qū)動器,。
啟動頻率是否太高,在啟動程序上是否設(shè)置了加速過程,,最好從電機規(guī)定的啟動頻率內(nèi)開始加速到設(shè)定頻率,,哪怕加速時間很短,否則可能就不穩(wěn)定,,甚至處于惰態(tài),。
電機未固定好時,有時會出現(xiàn)此狀況,,則屬于正常,。因為,實際上此時造成了電機的強烈共振而導(dǎo)致進入失步狀態(tài),。電機必須固定好,。
對于5相電機來說,相位接錯,,電機也不能工作,。
08 我想通過通訊方式直接控制伺服電機,可以嗎,?
可以的,,也比較方便,只是速度問題,,用于對響應(yīng)速度要求不太高的應(yīng)用,。如果要求快速的響應(yīng)控制參數(shù),最好用伺服運動控制卡,,一般它上面有DSP和高速度的邏輯處理電路,,以實現(xiàn)高速高精度的運動控制。如S加速,、多軸插補等,。
09 用開關(guān)電源給步進和直流電機系統(tǒng)供電好不好?
一般最好不要,,特別是大力矩電機,,除非選用比需要的功率大一倍以上的開關(guān)電源。因為,,電機工作時是大電感型負載,,會對電源端形成瞬間的高壓。而開關(guān)電源的過載性能不好,,會保護關(guān)斷,,且其精密的穩(wěn)壓性能又不需要,有時可能造成開關(guān)電源和驅(qū)動器的損壞,??梢杂贸R?guī)的環(huán)形或R型變壓器變壓的直流電源。
10 想用±10V或4~20mA的直流電壓來控制步進電機,,可以嗎,?
可以,但需要另外的轉(zhuǎn)換模塊,。
11 有一個的伺服電機帶編碼器反饋,,可否用只帶測速機口的伺服驅(qū)動器控制?
可以,,需要配一個編碼器轉(zhuǎn)測速機信號模塊,。
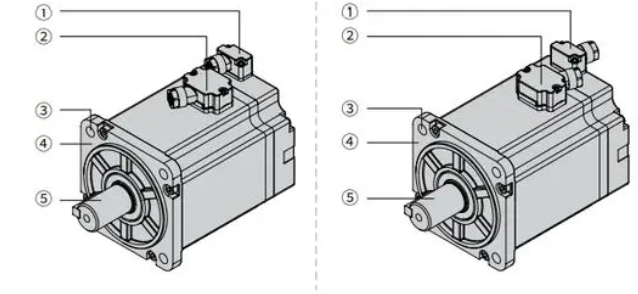
12 伺服電機的碼盤部分可以拆開嗎?
禁止拆開,因為碼盤內(nèi)的石英片很容易破裂,,且進入灰塵后,,壽命和精度都將無法保證,需要專業(yè)人員檢修,。
13 步進和伺服電機可以拆開檢修或改裝嗎,?
不要,,最好讓廠家去做,拆開后沒有專業(yè)設(shè)備很難安裝回原樣,,電機的轉(zhuǎn)定子間的間隙無法保證。磁鋼材料的性能被破壞,,甚至造成失磁,,電機力矩大大下降。
14 伺服控制器能夠感知外部負載的變化嗎,?
如遇到設(shè)定阻力時停止,、返回或保持一定的推力跟進,。
15 可以將國產(chǎn)的驅(qū)動器或電機和國外優(yōu)質(zhì)的電機或驅(qū)動器配用嗎,?
原則上是可以的,,但要搞清楚電機的技術(shù)參數(shù)后才能配用,,否則會大大降低應(yīng)有的效果,,甚至影響長期運行和壽命。最好向供應(yīng)商咨詢后再決定,。
16 使用大于額定電壓值的直流電源電壓驅(qū)動電機安全嗎,?
正常來說這不是問題,,只要電機在所設(shè)定的速度和電流極限值內(nèi)運行,。因為電機速度與電機線電壓成正比,,因此選擇某種電源電壓不會引起過速,,但可能發(fā)生驅(qū)動器等故障,。
此外,,必須保證電機符合驅(qū)動器的最小電感系數(shù)要求,,而且還要確保所設(shè)定的電流極限值小于或等于電機的額定電流,。
事實上,,如果你能在你設(shè)計的裝置中讓電機跑地比較慢的話(低于額定電壓),,這是很好的。
以較低的電壓(因此比較低的速度)運行會使得電刷運轉(zhuǎn)反彈較少,,而且電刷/換向器磨損較小,,比較低的電流消耗和比較長的電機壽命。
另一方面,,如果電機大小的限制和性能的要求需要額外的轉(zhuǎn)矩及速度,,過度驅(qū)動電機也是可以的,但會犧牲產(chǎn)品的使用壽命,。
17 如何為應(yīng)用選擇適當(dāng)?shù)墓╇婋娫矗?/p>
推薦選擇電源電壓值比最大所需的電壓高10%-50%,。此百分比因Kt、Ke,,以及系統(tǒng)內(nèi)的電壓降而不同,。驅(qū)動器的電流值應(yīng)該足夠傳送應(yīng)用所需的能量。記住驅(qū)動器的輸出電壓值與供電電壓不同,,因此驅(qū)動器輸出電流也與輸入電流不相同,。為確定合適的供電電流,需要計算此應(yīng)用所有的功率需求,,再增加5%,。按I=P/V公式計算即可得到所需電流值。
推薦選擇電源電壓值比最大所需的電壓高10%-50%,。此百分比因Kt,、Ke,,以及系統(tǒng)內(nèi)的電壓降而不同。驅(qū)動器的電流值應(yīng)該足夠傳送應(yīng)用所需的能量,。記住驅(qū)動器的輸出電壓值與供電電壓不同,,因此驅(qū)動器輸出電流也與輸入電流不相同,。為確定合適的供電電流,需要計算此應(yīng)用所有的功率需求,再增加5%,。按I=P/V公式計算即可得到所需電流值。
18 對于伺服驅(qū)動器我可以選擇那種工作方式,?
不同的模式并不全部存在于所有型號的驅(qū)動器中,。
19 驅(qū)動器和系統(tǒng)如何接地,?
如果在交流電源和驅(qū)動器直流總線(如變壓器)之間沒有隔離的話,,不要將直流總線的非隔離端口或非隔離信號的地接大地,,這可能會導(dǎo)致設(shè)備損壞和人員傷害,。因為交流的公共電壓并不是對大地的,,在直流總線地和大地之間可能會有很高的電壓,。
在多數(shù)伺服系統(tǒng)中,,所有的公共地和大地在信號端是接在一起的,。多種連接大地方式產(chǎn)生的地回路很容易受噪音影響而在不同的參考點上產(chǎn)生流,。
為了保持命令參考電壓的恒定,,要將驅(qū)動器的信號地接到控制器的信號地,。它也會接到外部電源的地,,這將影響到控制器和驅(qū)動器的工作(如:編碼器的5V電源),。
屏蔽層接地是比較困難的,,有幾種方法,。正確的屏蔽接地處是在其電路內(nèi)部的參考電位點上,。這個點取決于噪聲源和接收是否同時接地,或者浮空,。要確保屏蔽層在同一個點接地使得地電流不會流過屏蔽層,。
20 減速器為什么不能和電機正好相配在標(biāo)準(zhǔn)轉(zhuǎn)矩點?
如果考慮到電機產(chǎn)生的經(jīng)過減速器的最大連續(xù)轉(zhuǎn)矩,,許多減速比會遠遠超過減速器的轉(zhuǎn)矩等級,。
如果我們要設(shè)計每個減速器來匹配滿轉(zhuǎn)矩,減速器的內(nèi)部齒輪會有太多組合(體積較大,、材料多),。
這樣會使得產(chǎn)品價格高,且違反了產(chǎn)品的“高性能,、小體積”原則,。
21 如何選用電動缸、滑臺,、精密平臺類產(chǎn)品,?其成本是如何計算的?
選擇致動執(zhí)行器類產(chǎn)品關(guān)鍵要看您對運動參數(shù)有什么樣的要求,,可以根據(jù)您需要的應(yīng)用來確定具體運動參數(shù)等技術(shù)條件,,這些參數(shù)要符合您的實際需要,,既要滿足應(yīng)用要求并留有余地,也不要提得太高,,否則其成本可能會數(shù)倍于標(biāo)準(zhǔn)型產(chǎn)品,。舉例來說,如果0.1mm精度夠用的話,,就不要選0.01mm的參數(shù),。其它如負載能力、速度等也是如此,。
另外一個給用戶的選型建議是,,如果不是必須,推拉力或負重,、速度,、定位精度這三個主要參數(shù)不要同時要求很高,因為致動執(zhí)行器是一個高精度高技術(shù)的機電一體化產(chǎn)品,,我們在設(shè)計制造時需要從機械結(jié)構(gòu),、電氣性能、材料特性,、材質(zhì)和處理方法等多方面考慮并選擇相應(yīng)的組成電機,、驅(qū)動控制器和反饋裝置,以及不同精度等級的導(dǎo)軌,、絲桿、支撐座和其它機械系統(tǒng),,使之達到需要的整體運動參數(shù),,可謂牽一發(fā)動全身的產(chǎn)品。當(dāng)然,,您有高要求的產(chǎn)品需要,,我們還是可以滿足,只是成本會相應(yīng)的提高,。
伺服系統(tǒng)的基本原理和數(shù)控應(yīng)用
伺服系統(tǒng)由伺服驅(qū)動裝置和驅(qū)動元件(或稱執(zhí)行元件伺服電機)組成,,高性能的伺服系統(tǒng)還有檢測裝置,反饋實際的輸出狀態(tài),。
一.機電一體化及其機床電氣控制技術(shù)的發(fā)展概況
機電一體化技術(shù)是隨著科學(xué)技術(shù)不斷發(fā)展,,生產(chǎn)工藝不斷提出新要求而迅速發(fā)展的。在控制方法上主要是從手動到自動,;在控制功能上,,是從簡單到復(fù)雜;在操作上,,是由笨重到輕巧,。隨著新的控制理論和新型電器及電子器件的出現(xiàn),,又為電氣控制技術(shù)的發(fā)展開拓了新途徑。
傳統(tǒng)機床電氣控制是繼電器接觸式控制系統(tǒng),,由繼電器,、接觸器、按鈕,、行程開關(guān)等組成,,實現(xiàn)對機床的啟動、停車,、有極調(diào)速等控制,。繼電器接觸式控制系統(tǒng)的優(yōu)點是結(jié)構(gòu)簡單、維護方便,、抗干擾強,、價格低,因此廣泛應(yīng)用于各類機床和機械設(shè)備,。目前,,在我國繼電器接觸式控制仍然是機床和其他機械設(shè)備最基本的電氣控制形式之一。
在實際生產(chǎn)中,,由于大量存在一些用開關(guān)量控制的簡單的程序控制過程,,而實際生產(chǎn)工藝和流程又是經(jīng)常變化的,因而傳統(tǒng)的繼電器接觸式控制系統(tǒng)常不能滿足這種要求,,因此曾出現(xiàn)了繼電器接觸控制和電子技術(shù)相結(jié)合的控制裝置,,叫做順序控制器。它能根據(jù)生產(chǎn)需要改變控制程序,,而又遠比電子計算機結(jié)構(gòu)簡單,,價格低廉,它是通過組合邏輯元件插接或編程來實現(xiàn)繼電器接觸控制的,。但它的裝置體積大,,功能也受到一定限制。隨著大規(guī)模集成電路和微處理機技術(shù)的發(fā)展及應(yīng)用,,上述控制技術(shù)也發(fā)生了根本性的變化,,在上世紀(jì)70年代出現(xiàn)了將計算機的存儲技術(shù)引入順序控制器,產(chǎn)生了新型工業(yè)控制器——可編程序控制器(PLC),,它兼?zhèn)淞擞嬎銠C控制和繼電器控制系統(tǒng)兩方面的優(yōu)點,,故目前在世界各國已作為一種標(biāo)準(zhǔn)化通用裝置普遍應(yīng)用于工業(yè)控制。
為解決占機械總加工量80%左右的單件和小批量生產(chǎn)的自動化難題,,50年代出現(xiàn)了數(shù)控機床,。它綜合應(yīng)用了電子、計算機,、檢測,、自動控制和機床結(jié)構(gòu)設(shè)計等各個技術(shù)領(lǐng)域的最新技術(shù)成就,,它是典型的機電一體化產(chǎn)品。數(shù)控機床經(jīng)過40年來的發(fā)展,,品種日益增多,,性能不斷完善,其中以輪廓控制的數(shù)控機床和帶有自動換刀裝置和工作臺能自動轉(zhuǎn)位的數(shù)控加工中心發(fā)展更為迅速,。數(shù)控機床由控制介質(zhì),、數(shù)控裝置、伺服系統(tǒng)和機床本體等部分組成,,其中伺服系統(tǒng)的性能是決定數(shù)控機床加工精度和生產(chǎn)率的主要因素之一,。
二.伺服系統(tǒng)在數(shù)控加工中的作用及組成
在自動控制系統(tǒng)中,把輸出量能以一定準(zhǔn)確度跟隨輸入量的變化而變化的系統(tǒng)稱為隨動系統(tǒng),,亦稱伺服系統(tǒng),。數(shù)控機床的伺服系統(tǒng)是指以機床移動部件的位置和速度作為控制量的自動控制系統(tǒng),又稱為隨動系統(tǒng),。
伺服系統(tǒng)由伺服驅(qū)動裝置和驅(qū)動元件(或稱執(zhí)行元件伺服電機)組成,,高性能的伺服系統(tǒng)還有檢測裝置,反饋實際的輸出狀態(tài),。
數(shù)控機床伺服系統(tǒng)的作用在于接受來自數(shù)控裝置的指令信號,,驅(qū)動機床移動部件跟隨指令脈沖運動,并保證動作的快速和準(zhǔn)確,,這就要求高質(zhì)量的速度和位置伺服,。以上指的主要是進給伺服控制,另外還有對主運動的伺服控制,,不過控制要求不如前者高,。數(shù)控機床的精度和速度等技術(shù)指標(biāo)往往主要取決于伺服系統(tǒng)。
三.伺服系統(tǒng)的基本要求和特點
1.對伺服系統(tǒng)的基本要求
(1)穩(wěn)定性好:穩(wěn)定是指系統(tǒng)在給定輸入或外界干擾作用下,,能在短暫的調(diào)節(jié)過程后到達新的或者回復(fù)到原有平衡狀態(tài)。
(2)精度高:伺服系統(tǒng)的精度是指輸出量能跟隨輸入量的精確程度,。作為精密加工的數(shù)控機床,,要求的定位精度或輪廓加工精度通常都比較高,允許的偏差一般都在0.01~0.00lmm之間,。
(3)快速響應(yīng)性好:快速響應(yīng)性是伺服系統(tǒng)動態(tài)品質(zhì)的標(biāo)志之一,,即要求跟蹤指令信號的響應(yīng)要快,一方面要求過渡過程時間短,,一般在200ms以內(nèi),,甚至小于幾十毫秒;另一方面,,為滿足超調(diào)要求,,要求過渡過程的前沿陡,,即上升率要大。
2.伺服系統(tǒng)的主要特點
(1)精確的檢測裝置:以組成速度和位置閉環(huán)控制,。
(2)有多種反饋比較原理與方法:根據(jù)檢測裝置實現(xiàn)信息反饋的原理不同,,伺服系統(tǒng)反饋比較的方法也不相同。目前常用的有脈沖比較,、相位比較和幅值比較3種,。
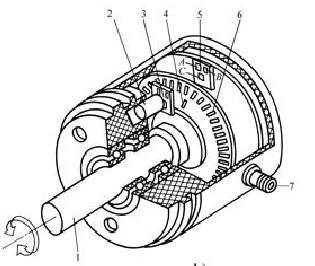
(3)高性能的伺服電動機(簡稱伺服電機):用于高效和復(fù)雜型面加工的數(shù)控機床,伺服系統(tǒng)將經(jīng)常處于頻繁的啟動和制動過程中,。要求電機的輸出力矩與轉(zhuǎn)動慣量的比值大,,以產(chǎn)生足夠大的加速或制動力矩。要求伺服電機在低速時有足夠大的輸出力矩且運轉(zhuǎn)平穩(wěn),,以便在與機械運動部分連接中盡量減少中間環(huán)節(jié),。
(4)寬調(diào)速范圍的速度調(diào)節(jié)系統(tǒng),即速度伺服系統(tǒng):從系統(tǒng)的控制結(jié)構(gòu)看,,數(shù)控機床的位置閉環(huán)系統(tǒng)可看作是位置調(diào)節(jié)為外環(huán),、速度調(diào)節(jié)為內(nèi)環(huán)的雙閉環(huán)自動控制系統(tǒng),其內(nèi)部的實際工作過程是把位置控制輸入轉(zhuǎn)換成相應(yīng)的速度給定信號后,,再通過調(diào)速系統(tǒng)驅(qū)動伺服電機,,實現(xiàn)實際位移。數(shù)控機床的主運動要求調(diào)速性能也比較高,,因此要求伺服系統(tǒng)為高性能的寬調(diào)速系統(tǒng),。
四.伺服系統(tǒng)的分類
伺服系統(tǒng)按其驅(qū)動元件劃分,有步進式伺服系統(tǒng),、直流電動機(簡稱直流電機)伺服系統(tǒng),、交流電動機(簡稱交流電機)伺服系統(tǒng)。按控制方式劃分,,有開環(huán)伺服系統(tǒng),、閉環(huán)伺服系統(tǒng)和半閉環(huán)伺服系統(tǒng)等,實際上數(shù)控系統(tǒng)也分成開環(huán),、閉環(huán)和半閉環(huán)3種類型,,就是與伺服系統(tǒng)這3種方式相關(guān)。
1.開環(huán)系統(tǒng)
圖1是開環(huán)系統(tǒng)構(gòu)成圖,,它主要由驅(qū)動電路,,執(zhí)行元件和機床3大部分組成。常用的執(zhí)行元件是步進電機,,通常稱以步進電機作為執(zhí)行元件的開環(huán)系統(tǒng)為步進式伺服系統(tǒng),,在這種系統(tǒng)中,如果是大功率驅(qū)動時,用步進電機作為執(zhí)行元件,。驅(qū)動電路的主要任務(wù)是將指令脈沖轉(zhuǎn)化為驅(qū)動執(zhí)行元件所需的信號,。
2.閉環(huán)系統(tǒng)
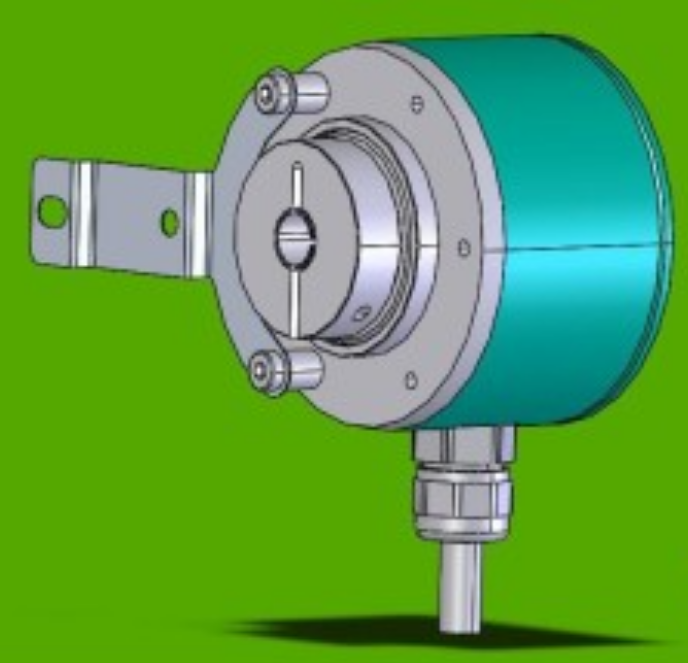
閉環(huán)系統(tǒng)主要由執(zhí)行元件、檢測單元,、比較環(huán)節(jié),、驅(qū)動電路和機床5部分組成。其構(gòu)成框圖如圖2所示,。在閉環(huán)系統(tǒng)中,,檢測元件將機床移動部件的實際位置檢測出來并轉(zhuǎn)換成電信號反饋給比較環(huán)節(jié)。常見的檢測元件有旋轉(zhuǎn)變壓器,、感應(yīng)同步器,、光柵、磁柵和編碼盤等,。通常把安裝在絲杠上的檢測元件組成的伺服系統(tǒng)稱為半閉環(huán)系統(tǒng),;把安裝在工作臺上的檢測元件組成的伺服系統(tǒng)稱為閉環(huán)系統(tǒng)。由于絲杠和工作臺之間傳動誤差的存在,,半閉環(huán)伺服系統(tǒng)的精度要比閉環(huán)伺服系統(tǒng)的精度低一些,。
比較環(huán)節(jié)的作用是將指令信號和反饋信號進行比較,兩者的差值作為伺服系統(tǒng)的跟隨誤差,,經(jīng)驅(qū)動電路,,控制執(zhí)行元件帶動工作臺繼續(xù)移動,直到跟隨誤差為零,。根據(jù)進入比較環(huán)節(jié)信號的形式以及反饋檢測方式,,閉環(huán)(半閉環(huán))系統(tǒng)可分為脈沖比較伺服系統(tǒng)、相位比較伺服系統(tǒng)和幅值比較伺服系統(tǒng)3種,。
由于比較環(huán)節(jié)輸出的信號比較微弱,,不足以驅(qū)動執(zhí)行元件,故需對其進行放大,,驅(qū)動電路正是為此而設(shè)置的,。
執(zhí)行元件的作用是根據(jù)控制信號,即來自比較環(huán)節(jié)的跟隨誤差信號,,將表示位移量的電信號轉(zhuǎn)化為機械位移,。常用的執(zhí)行元件有直流寬調(diào)速電動機、交流電動機等,。執(zhí)行元件是伺服系統(tǒng)中必不可少的一部分,驅(qū)動電路是隨執(zhí)行元件的不同而不同的,。
最近,,我校研制開發(fā)出了高性能交流伺服(數(shù)控機床)控制系統(tǒng)。該系統(tǒng)性能穩(wěn)定,質(zhì)量可靠,,可廣泛應(yīng)用于數(shù)碼雕刻,,包裝機械,模具生產(chǎn)等工業(yè)生產(chǎn)應(yīng)用場合,,更適用于高等學(xué)校機電一體化,,電子電器,電氣自動化專業(yè)學(xué)生(研究生)生產(chǎn)實習(xí),,課程設(shè)計等課程的實驗研究,。
五.伺服系統(tǒng)的發(fā)展方向
隨著生產(chǎn)力不斷發(fā)展,要求伺服系統(tǒng)向高精度,、高速度,、大功率方向發(fā)展。
(1)充分利用迅速發(fā)展的電子和計算機技術(shù),,采用數(shù)字式伺服系統(tǒng),,利用微機實現(xiàn)調(diào)節(jié)控制,增強軟件控制功能,,排除模擬電路的非線性誤差和調(diào)整誤差以及溫度漂移等因素的影響,,這可大大提高伺服系統(tǒng)的性能,并為實現(xiàn)最優(yōu)控制,、自適應(yīng)控制創(chuàng)造條件,。
(2)開發(fā)高精度、快速檢測元件,。
(3)開發(fā)高性能的伺服電機(執(zhí)行元件),。目前交流伺服電機的變速比已達1∶10000,使用日益增多,。無刷電機因無電刷和換向片零部件,,加速性能要比直流伺服電機高兩倍,維護也較方便,,常用于高速數(shù)控機床,。