伺服驅(qū)動(dòng)器有哪幾種維修檢測(cè)方式?伺服系統(tǒng)的故障診斷與處理,!
在伺服電機(jī)行業(yè)一段時(shí)間了,,發(fā)現(xiàn)經(jīng)常會(huì)有客戶(hù)咨詢(xún)一個(gè)問(wèn)題。那就是伺服電機(jī)的質(zhì)保多久,,這個(gè)問(wèn)題我相信很多人都會(huì)問(wèn)到和關(guān)心到,。前兩天,一個(gè)廣州客戶(hù)訂了20套拓達(dá)的伺服電機(jī),,在微信上面也是和我詳細(xì)的確認(rèn)了我們伺服電機(jī)的保修期,,還有如何保養(yǎng)一些問(wèn)題。今天,,我們就這個(gè)問(wèn)題詳細(xì)的講一下,。一般電機(jī)的質(zhì)量保障期是在一年,一年之內(nèi)除人為原因損壞之外,,都是可以保修的,。伺服電機(jī)只要您運(yùn)作得當(dāng),選比較妥當(dāng)?shù)呐谱?,使用壽命是比較長(zhǎng)的,。那么日常生活中我們應(yīng)該如何使用和維護(hù),才能延長(zhǎng)我們機(jī)器的使用壽命呢,?一般是通過(guò)控制伺服電機(jī)的位置,、速度、扭矩來(lái)實(shí)現(xiàn)高精度定位的傳動(dòng)系統(tǒng),,是目前傳動(dòng)技術(shù)中的高端產(chǎn)品,。如何檢查和修理伺服驅(qū)動(dòng)器?以下是伺服驅(qū)動(dòng)器維護(hù)的七種主要方法,。

1.示波器檢查驅(qū)動(dòng)器的電流監(jiān)控輸出,發(fā)現(xiàn)都是噪音,,無(wú)法讀取,。
原因:電流監(jiān)控輸出沒(méi)有與交流電源(變壓器)隔離。
處理方式:可用DC電壓表檢測(cè)觀察,。
2.電機(jī)在一個(gè)方向上比在另一個(gè)方向上跑得快,。
(1)故障原因:無(wú)刷電機(jī)相位誤差。
處理方式:檢測(cè)或檢測(cè)正確的相位,。
(2)故障原因:不用于測(cè)試時(shí),,測(cè)試/偏差開(kāi)關(guān)處于測(cè)試位置。
處理方式:將測(cè)試/偏差開(kāi)關(guān)轉(zhuǎn)到偏差位置,。
(3)故障原因:偏差電位器位置不正確,。
處理方式:復(fù)位。
3.電機(jī)失速
(1)故障原因:速度反饋極性錯(cuò)誤,。
解決方法:可以嘗試以下方法,。
A.如果可能,將位置反饋極性開(kāi)關(guān)切換到另一個(gè)位置,。(某些驅(qū)動(dòng)器也可以)
B.如果使用轉(zhuǎn)速表,,更換驅(qū)動(dòng)器上的轉(zhuǎn)速+和轉(zhuǎn)速開(kāi)關(guān)。
C.如果使用編碼器,,連接驅(qū)動(dòng)器上的ENCA和ENCB,。
D.如果是霍爾速度模式,駕駛員將在霍爾-1和霍爾-3之間切換,,然后在電機(jī)-A和電機(jī)-B之間切換
(2)故障原因:編碼器速度反饋,,編碼器電源故障。
處理:檢查連接5V編碼器的電源,。確保電源提供足夠的電流,。如果使用外部電源,確保電壓在驅(qū)動(dòng)器的信號(hào)低,。
4.LED燈為綠色,,但電機(jī)不動(dòng)。
(1)故障原因:禁止電機(jī)的一個(gè)或多個(gè)方向運(yùn)行,。
方法:檢查+抑制和-抑制端口,。
(2)故障原因:指令信號(hào)不在驅(qū)動(dòng)信號(hào)地。
處理:命令信號(hào)與驅(qū)動(dòng)信號(hào)相連,。
5.電源指示燈,,驅(qū)動(dòng)器的指示燈不亮。
原因:電源電壓過(guò)低,,低于最低電壓要求,。
解決方法:檢查并增加電源電壓,。
6.電機(jī)旋轉(zhuǎn)時(shí),LED燈閃爍,。
(1)故障原因:霍爾相位誤差,。
處理:檢查電機(jī)相位設(shè)定開(kāi)關(guān)(60/120)是否正確。大多數(shù)無(wú)刷電機(jī)相差120°,。
(2)故障原因:霍爾傳感器故障,。
故障排除:電機(jī)轉(zhuǎn)動(dòng)時(shí),檢查A,、B,、C廳電壓。電壓應(yīng)在5伏直流電和0伏直流電之間,。
7.發(fā)光二極管燈總是紅色的,。
原因:有故障。
處理方法:依次消除過(guò)壓,、欠壓,、短路,、過(guò)熱,。禁用驅(qū)動(dòng)器和無(wú)效霍爾。
由于運(yùn)動(dòng)控制系統(tǒng)最終用戶(hù)的工作條件和企業(yè)一線(xiàn)工程技術(shù)支撐能力的限制,,常常使得機(jī)電系統(tǒng)不能夠得到良好的設(shè)備管理,,輕則縮短機(jī)電一體化設(shè)備的生命周期,重則由于設(shè)備故障降低產(chǎn)能造成經(jīng)濟(jì)效益的損失,。
總而言之,,只要你選擇了比較妥當(dāng)牌子的伺服電機(jī)再加上一些日常的維護(hù),使用壽命一般都是比較長(zhǎng)的,。
伺服系統(tǒng)的故障診斷與處理
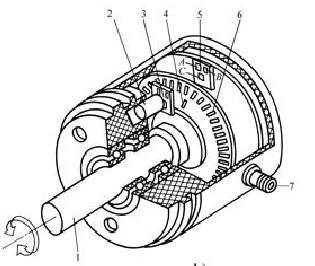
進(jìn)給伺服系統(tǒng)是以運(yùn)動(dòng)部件的位置和速度作為控制量的自動(dòng)控制系統(tǒng),,在數(shù)控機(jī)床等行業(yè)具有廣泛的應(yīng)用,其故障的診斷處理也是一直被人們所重視的地方,。下面就讓我們一起來(lái)看著進(jìn)給伺服系統(tǒng)具有哪些故障形式,,該如何診斷與處理吧!
故障形式及原因診斷
(1)超程
當(dāng)進(jìn)給運(yùn)動(dòng)超過(guò)由軟件設(shè)定的軟限位或由限位開(kāi)關(guān)決定的硬限位時(shí),,就會(huì)發(fā)生超程報(bào)警,。一般會(huì)在CRT上顯示報(bào)警內(nèi)容。根據(jù)數(shù)控系統(tǒng)說(shuō)明書(shū),,即可排除故障,,解除報(bào)警。
(2)過(guò)載
當(dāng)進(jìn)給運(yùn)動(dòng)的負(fù)載過(guò)大,,頻繁正反向運(yùn)動(dòng)以及傳動(dòng)鏈潤(rùn)滑狀態(tài)不良時(shí),,均會(huì)引起過(guò)載報(bào)警,。一般會(huì)在CRT上顯示伺服電機(jī)過(guò)載、過(guò)熱或過(guò)流等報(bào)警信息,。同時(shí),,在強(qiáng)電柜中的進(jìn)給驅(qū)動(dòng)單元上,指示燈或數(shù)碼管會(huì)提示驅(qū)動(dòng)單元過(guò)載,、過(guò)電流等信息,。
(3)竄動(dòng)
在進(jìn)給時(shí)出現(xiàn)竄動(dòng)現(xiàn)象,其原因包括:① 測(cè)速信號(hào)不穩(wěn)定,,如測(cè)速裝置故障,、測(cè)速反饋信號(hào)干擾等;② 速度控制信號(hào)不穩(wěn)定或受到干擾,;③接線(xiàn)端子接觸不良,,如螺釘松動(dòng)等。當(dāng)竄動(dòng)發(fā)生在由正向運(yùn)動(dòng)與反向運(yùn)動(dòng)的換向瞬間時(shí),,一般是由于進(jìn)給傳動(dòng)鏈的反向間隙或伺服系統(tǒng)增益過(guò)大所致,。
(4)爬行
發(fā)生在啟動(dòng)加速階段或低速進(jìn)給時(shí),一般是由于進(jìn)給傳動(dòng)鏈的潤(rùn)滑狀態(tài)不良,、伺服系統(tǒng)增益低和外加負(fù)載過(guò)大等因素所致,。尤其要注意的是,伺服電動(dòng)機(jī)和滾珠絲杠連接用的聯(lián)軸器,,由于連接松動(dòng)或聯(lián)軸器本身的缺陷,,如裂紋等,造成滾珠絲杠轉(zhuǎn)動(dòng)和伺服電動(dòng)機(jī)的轉(zhuǎn)動(dòng)不同步,,從而使進(jìn)給運(yùn)動(dòng)忽快忽慢,,產(chǎn)生爬行現(xiàn)象。
(5)振動(dòng)
機(jī)床以高速運(yùn)行時(shí),,可能產(chǎn)生振動(dòng),,這時(shí)就會(huì)出現(xiàn)過(guò)流報(bào)警。機(jī)床振動(dòng)問(wèn)題一般屬于速度問(wèn)題,,所以應(yīng)去查找速度環(huán),,即凡是與速度有關(guān)的問(wèn)題,應(yīng)該去查找速度調(diào)節(jié)器,。因此,,振動(dòng)問(wèn)題應(yīng)查找速度調(diào)節(jié)器。主要從給定信號(hào),、反饋信號(hào)及速度調(diào)節(jié)器本身這三方面去查找故障,。
① 首先檢查輸入給速度調(diào)節(jié)器的信號(hào),即給定信號(hào),。給定信號(hào)由位置偏差計(jì)數(shù)器發(fā)出,,經(jīng)D/A轉(zhuǎn)換器轉(zhuǎn)換成模擬量VCMD,、再送入速度調(diào)節(jié)器。應(yīng)查一下這個(gè)信號(hào)是否有振動(dòng)分量,,如它只有一個(gè)周期的振動(dòng)信號(hào),,可以確認(rèn)速度調(diào)節(jié)器沒(méi)有問(wèn)題,而是前級(jí)的問(wèn)題,,即應(yīng)到D/A轉(zhuǎn)換器或位置偏差計(jì)數(shù)器中去查找問(wèn)題,。如果正常,就轉(zhuǎn)向查找測(cè)速發(fā)電機(jī)和伺服電動(dòng)機(jī)的問(wèn)題,。
② 檢查測(cè)速發(fā)電機(jī)及伺服電機(jī),。當(dāng)機(jī)床振動(dòng)時(shí),說(shuō)明機(jī)床速度在振蕩,,測(cè)速發(fā)電機(jī)反饋回來(lái)的波形一定也在振蕩,,觀察它的波形是否出現(xiàn)有規(guī)律的大起大落。這時(shí),,最好能測(cè)一下機(jī)床的振動(dòng)頻率與電動(dòng)機(jī)旋轉(zhuǎn)的速度是否存在一個(gè)準(zhǔn)確的比例關(guān)系,,如振動(dòng)的頻率是電動(dòng)機(jī)轉(zhuǎn)速的四倍頻率,這時(shí)就應(yīng)考慮電動(dòng)機(jī)或測(cè)速發(fā)電機(jī)有故障,。首先要檢查電動(dòng)機(jī)有無(wú)故障,,查其碳刷、換向器表面狀況,,如果沒(méi)有問(wèn)題,,就再檢查測(cè)速發(fā)電機(jī),。
③ 速度調(diào)節(jié)器故障,。若采用上述方法還不能完全消除振動(dòng),甚至無(wú)任何改善,,就應(yīng)考慮速度調(diào)節(jié)器本身的問(wèn)題,,應(yīng)更換速度調(diào)節(jié)器板或換下后徹底檢測(cè)各處波形。
④ 檢查振動(dòng)頻率與進(jìn)給速度的關(guān)系,。若二者成比例,,除機(jī)床共振原因外,多數(shù)是因?yàn)镃NC系統(tǒng)插補(bǔ)精度太差或位置檢測(cè)增益太高引起的,,需要進(jìn)行插補(bǔ)調(diào)整和檢測(cè)增益的調(diào)整,。如果與進(jìn)給速度無(wú)關(guān),則可能原因有:速度控制單元的設(shè)定與機(jī)床不匹配,,速度控制單元調(diào)整不好,,該軸的速度環(huán)增益太大或速度控制單元的印制電路板不良。
實(shí)例: X軸振蕩的故障維修
故障現(xiàn)象:一臺(tái)配套FANUC OMC的數(shù)控機(jī)床,,加工中心X軸負(fù)載有時(shí)突然上升到80%,,同時(shí) X軸電動(dòng)機(jī)嗡嗡作響,;有時(shí)又正常。
分析及處理過(guò)程:現(xiàn)場(chǎng)觀察發(fā)現(xiàn) X軸電動(dòng)機(jī)嗡嗡作響的頻率較低,,故判斷 X軸發(fā)生低頻振蕩,。發(fā)生振蕩的原因有:
①軸位置環(huán)增益不合適;
②機(jī)械部分間隙大,,傳動(dòng)鏈剛性差,,有卡滯;
③負(fù)載慣量較大,。
經(jīng)查X軸位置增益未變,,負(fù)載也正常。此機(jī)床由于一直進(jìn)行重切削加工,,X軸間隙較大,,剛進(jìn)行過(guò)間隙補(bǔ)償。經(jīng)查X軸間隙補(bǔ)償參數(shù)0535,,設(shè)定值為250,,用百分表測(cè)得X軸實(shí)際間隙為0.22,補(bǔ)償過(guò)渡,;直到將設(shè)定值改為200后,,X軸振蕩才消除。
(6)伺服電機(jī)不轉(zhuǎn)
數(shù)控系統(tǒng)輸入至進(jìn)給驅(qū)動(dòng)單元的除了速度控制信號(hào)外,,還有伺服使能控制信號(hào),,一般為DC + 24 V繼電器線(xiàn)圈電壓。① 檢查數(shù)控系統(tǒng)是否有速度控制信號(hào)輸出,;② 檢查使能信號(hào)是否接通,。通過(guò)CRT觀察I/O狀態(tài),分析機(jī)床PLC梯形圖(或流程圖),,以確定進(jìn)給軸的啟動(dòng)條件,,如潤(rùn)滑、冷卻等是否滿(mǎn)足,;③ 對(duì)帶電磁制動(dòng)的伺服電動(dòng)機(jī),,應(yīng)檢查電磁制動(dòng)是否釋放;④ 進(jìn)給驅(qū)動(dòng)單元故障,;⑤ 伺服電動(dòng)機(jī)故障,。
(7)位置誤差
當(dāng)伺服軸運(yùn)動(dòng)超過(guò)位置允差范圍時(shí),數(shù)控系統(tǒng)就會(huì)產(chǎn)生位置誤差過(guò)大的報(bào)警,,包括跟隨誤差,、輪廓誤差和定位誤差等。主要原因有:① 系統(tǒng)設(shè)定的允差范圍??;② 伺服系統(tǒng)增益設(shè)置不當(dāng),;③ 位置檢測(cè)裝置有污染;④ 進(jìn)給傳動(dòng)鏈累積誤差過(guò)大,;⑤ 主軸箱垂直運(yùn)動(dòng)時(shí)平衡裝置(如平衡油缸等)不穩(wěn),。
(8)漂移
當(dāng)指令值為零時(shí),坐標(biāo)軸仍移動(dòng),,從而造成位置誤差,。通過(guò)漂移補(bǔ)償和驅(qū)動(dòng)單元上的零速調(diào)整來(lái)消除。
(9)回參考點(diǎn)故障
回參考點(diǎn)故障一般分為找不到參考點(diǎn)和找不準(zhǔn)參考點(diǎn)兩類(lèi),。前一類(lèi)故障一般是回參考點(diǎn)減速開(kāi)關(guān)產(chǎn)生的信號(hào)或零位脈沖信號(hào)失效,,可以通過(guò)檢查脈沖編碼器零標(biāo)志位或光柵尺零標(biāo)志位來(lái)確定是否有故障;后一類(lèi)故障是參考點(diǎn)開(kāi)關(guān)擋塊位置設(shè)置不當(dāng)引起的,,需要重新調(diào)整擋塊位置,。
(10)伺服電動(dòng)機(jī)開(kāi)機(jī)后既自動(dòng)旋轉(zhuǎn)
主要原因有:① 位置反饋的極性錯(cuò)誤;② 由于外力使坐標(biāo)軸產(chǎn)生了位置偏移,;③驅(qū)動(dòng)器,、測(cè)速發(fā)電機(jī)、伺服電動(dòng)機(jī)或系統(tǒng)位置測(cè)量回路不良,;④ 電動(dòng)機(jī)或驅(qū)動(dòng)器有故障,。
進(jìn)給驅(qū)動(dòng)的故障診斷
1、直流進(jìn)給驅(qū)動(dòng)
PWM調(diào)速是利用脈寬調(diào)制器對(duì)大功率晶體管的開(kāi)關(guān)時(shí)間進(jìn)行控制,。將速度控制信號(hào)轉(zhuǎn)換成—定頻率的方波電壓,,加到直流伺服電機(jī)電樞的兩端,通過(guò)對(duì)方波寬度的控制,,改變電樞兩端的平均電壓,,從而達(dá)到控制電樞電流,進(jìn)而控制伺服電動(dòng)機(jī)轉(zhuǎn)速的目的,。晶閘管調(diào)速則是利用速度調(diào)節(jié)器對(duì)晶閘管的導(dǎo)通角進(jìn)行控制,,通過(guò)改變導(dǎo)通角的大小來(lái)改變電樞兩端的電壓,從而達(dá)到調(diào)速的目的,。
1.CRT有報(bào)警顯示的故障
對(duì)于FANUC系統(tǒng),CRT顯示的伺服報(bào)警為400~457號(hào)伺服系統(tǒng)錯(cuò)誤報(bào)警和702~704號(hào)過(guò)熱報(bào)警,。引起過(guò)熱報(bào)警的原因有:
① 機(jī)床切削條件苛刻及機(jī)床摩擦力矩增大,,引起主回路中的過(guò)載繼電器動(dòng)作;
② 切削時(shí)伺服電動(dòng)機(jī)電流太大或變壓器本身故障,,引起伺服變壓器熱控開(kāi)關(guān)動(dòng)作,;
③ 伺服電動(dòng)機(jī)電樞內(nèi)部短路或絕緣不良、電動(dòng)機(jī)永久磁體去磁或脫落及電動(dòng)機(jī)制動(dòng)器不良,,引起電動(dòng)機(jī)內(nèi)的熱控開(kāi)關(guān)動(dòng)作,。
2.報(bào)警指示燈指示的故障
對(duì)于FANUC系統(tǒng)和Siemens系統(tǒng)速度控制單元中的印制線(xiàn)路板上有報(bào)警燈,,其功能、故障原因及排除方法可參看相應(yīng)機(jī)床說(shuō)明書(shū),。
3.無(wú)報(bào)警顯示的故障
① 機(jī)床失控,。速度反饋信號(hào)為正反饋信號(hào),多發(fā)生在維修調(diào)試過(guò)程中,,通常是電纜信號(hào)線(xiàn)連接錯(cuò)誤所致,。
② 機(jī)床振動(dòng)。與位置控制有關(guān)的系統(tǒng)參數(shù)設(shè)定錯(cuò)誤,,如指令倍率CRM和檢測(cè)倍率DMR的設(shè)定錯(cuò)誤等,。檢查機(jī)床振動(dòng)周期,如機(jī)床振動(dòng)周期隨進(jìn)給速度變化,,特別是快速移動(dòng)時(shí),,伴有大的沖擊,多為測(cè)速裝置有故障,,如伺服電動(dòng)機(jī)上的測(cè)速發(fā)電機(jī)電刷接觸不良,;若機(jī)床振動(dòng)周期不隨進(jìn)給速度變化,則調(diào)節(jié)增益電位器,,使增益降低,,觀察振動(dòng)是否減弱。若減弱,,且振動(dòng)頻率是幾十赫茲到幾百赫茲,,也即機(jī)床的固有振動(dòng)頻率,則可通過(guò)印制線(xiàn)路板上的有關(guān)設(shè)定來(lái)解決,。若振動(dòng)不減弱,,則是印制線(xiàn)路板有故障。
③ 定位精度低,。除機(jī)床進(jìn)給傳動(dòng)鏈誤差大外,,還與伺服系統(tǒng)增益太低有關(guān),調(diào)節(jié)增益電位器,,增大增益,,以確認(rèn)能否消除故障。
④ 電動(dòng)機(jī)運(yùn)行時(shí)噪聲過(guò)大,。伺服電動(dòng)機(jī)換向器的表面粗糙度不好或有損傷,;油液或灰塵等侵入電刷或換向器;電動(dòng)機(jī)軸向存在竄動(dòng),。
⑤ 伺服電動(dòng)機(jī)不轉(zhuǎn),。電動(dòng)機(jī)永久磁鐵脫落;帶電磁制動(dòng)器的伺服電動(dòng)機(jī),制動(dòng)器失靈,,通電后未能脫開(kāi),。
2、交流進(jìn)給驅(qū)動(dòng)
1.交流伺服電動(dòng)機(jī)的基本檢查,。原則上說(shuō),,交流伺服電動(dòng)機(jī)可以不需要維修,因?yàn)樗鼪](méi)有損壞,。但由于交流伺服電動(dòng)機(jī)內(nèi)含有精密檢測(cè)器,,因此,當(dāng)發(fā)生碰撞,、沖擊時(shí)可能會(huì)引起故障,,維修時(shí)應(yīng)進(jìn)行如下檢查:
①是否受到任何機(jī)械損傷;
② 旋轉(zhuǎn)部分是否可用手正常轉(zhuǎn)動(dòng),;
③ 帶制動(dòng)器的,,制動(dòng)器是否正常;
④是否有任何松動(dòng)螺釘或間隙,;
⑤是否安裝在潮濕,、溫度變化劇烈和有灰塵的地方。
2.交流伺服電動(dòng)機(jī)的安裝注意事項(xiàng),。維修完成后,,安裝伺服要注意以下幾點(diǎn):
① 由于伺服系統(tǒng)防水結(jié)構(gòu)不是很?chē)?yán)密,如果切削液,、潤(rùn)滑油等滲入內(nèi)部,,會(huì)引起絕緣性能降低或繞組短路,因此,,應(yīng)注意盡可能避免切削液濺入,;
② 當(dāng)伺服電動(dòng)機(jī)安裝在齒輪箱上時(shí),加注潤(rùn)滑油時(shí)應(yīng)注意齒輪箱的潤(rùn)滑油油面高度必須低于伺服的輸出軸,,防止?jié)櫥蜐B入內(nèi)部,。
③ 當(dāng)固定伺服聯(lián)軸器、齒輪,、同步帶等連接件時(shí),,在任何情況下,作用在上面的力不能超過(guò)容許的徑向,、軸向負(fù)載,。
④ 按說(shuō)明書(shū)規(guī)定,對(duì)伺服和控制電路之間進(jìn)行正確的連接,。
3.交流伺服電動(dòng)機(jī)常見(jiàn)的故障。包括以下幾點(diǎn):
① 轉(zhuǎn)子位置檢測(cè)裝置故障。當(dāng)霍爾開(kāi)關(guān)或光電脈沖編碼器發(fā)生故障時(shí),,會(huì)引起失控,,進(jìn)給有振動(dòng)。
② 用萬(wàn)用表或電橋測(cè)量電樞繞組的直流電阻,,檢查是否斷路,,并用兆歐表查絕緣是否良好。
③ 將與機(jī)械裝置分離,,用手轉(zhuǎn)動(dòng)轉(zhuǎn)子,,正常情況下感覺(jué)有阻力,轉(zhuǎn)一個(gè)角度后手放開(kāi),,轉(zhuǎn)子又返回,;如果用手轉(zhuǎn)動(dòng)轉(zhuǎn)子時(shí)能連續(xù)轉(zhuǎn)幾圈并自由停下,則該電動(dòng)機(jī)已損壞,;如果用手轉(zhuǎn)不動(dòng)或轉(zhuǎn)動(dòng)后無(wú)返回,,則機(jī)械部分可能有故障。
④ 脈沖編碼器的更換,。若交流伺服的脈沖編碼器不良,,就應(yīng)更換脈沖編碼器。
3,、步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)
步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)是開(kāi)環(huán)控制系統(tǒng)中最常選用的伺服驅(qū)動(dòng)系統(tǒng),。開(kāi)環(huán)進(jìn)給系統(tǒng)的結(jié)構(gòu)較簡(jiǎn)單,調(diào)試,、維修,、使用都很方便,工作可靠,,成本低廉,。在一般要求精度不太高的機(jī)床上曾得到廣泛應(yīng)用。
使用過(guò)程中,,步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)系統(tǒng)有如下常見(jiàn)故障:
1.電動(dòng)機(jī)過(guò)熱報(bào)警,。可能是工作環(huán)境過(guò)于惡劣,,環(huán)境溫度過(guò)高,;參數(shù)選擇不當(dāng),如電流過(guò)大,、超過(guò)相電流和可重新設(shè)置參數(shù)等,。
2.工作中,尖叫后不轉(zhuǎn),,具體情況為加工或運(yùn)行過(guò)程中,,驅(qū)動(dòng)器或步進(jìn)電動(dòng)機(jī)發(fā)出刺耳的尖叫聲,。可能的原因是輸入脈沖頻率太高,,引起堵轉(zhuǎn),,可通過(guò)降低輸入脈沖頻率來(lái)排除;輸入脈沖的突調(diào)頻率太高,,可通過(guò)降低輸入脈沖的突調(diào)頻率來(lái)排除,。
3.工作過(guò)程中停車(chē),在工作正常的狀況下,,發(fā)生突然停車(chē)的故障,。
4.步進(jìn)電動(dòng)機(jī)失步或多步,此故障引起的可能現(xiàn)象是工作過(guò)程中,,配置步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)系統(tǒng)的某軸突然停頓,,而后,又繼續(xù)走動(dòng),。
5.運(yùn)轉(zhuǎn)不均勻,,有抖動(dòng)。反映在加工中是加工的工件有振紋,,表面粗糙度大,。
一般常見(jiàn)的有以下幾種處理方法:
(1)修理或更換元器件。
(2)重新安裝或插接相關(guān)的連接狀況,。
(3)調(diào)整相關(guān)參數(shù),。
數(shù)控系統(tǒng)、PLC 及伺服驅(qū)動(dòng)系統(tǒng)都設(shè)置了許多可修改的參數(shù),,以適應(yīng)不同機(jī)床,、不同工作狀態(tài)的要求。這些參數(shù)不僅能使各電氣系統(tǒng)與具體機(jī)床相匹配,,而且能使機(jī)床各項(xiàng)功能達(dá)到最佳化,。因此,任何參數(shù)的變化(尤其是模擬量參數(shù))甚至丟失都是不允許的,;而隨機(jī)床的長(zhǎng)期運(yùn)行所引起的機(jī)械或電氣性能的變化,,會(huì)打破最初的匹配狀態(tài)和最佳化狀態(tài),需要重新調(diào)整相關(guān)的一個(gè)或多個(gè)參數(shù)給予排除,。
這種方法對(duì)維修人員的要求很高,,不僅要對(duì)具體系統(tǒng)主要參數(shù)十分了解,即知曉其地址和熟悉其作用,,而且要有較豐富的電氣調(diào)試經(jīng)驗(yàn),。
(4)特殊處理法。
當(dāng)今的數(shù)控系統(tǒng)已進(jìn)入PC 和開(kāi)放化的發(fā)展階段,,其中軟件含量越來(lái)越豐富,,有系統(tǒng)軟件,、機(jī)床制造者軟件,甚至還有使用者自己的軟件,。由于軟件邏輯的設(shè)計(jì)中存在一些不可避免的問(wèn)題,,使得有些故障狀態(tài)無(wú)法分析,,如死機(jī)現(xiàn)象,。對(duì)于這種故障現(xiàn)象可以采取特殊手段來(lái)處理,如整機(jī)斷電,,稍作停頓后再開(kāi)機(jī),,有時(shí)就可將故障消除。
維修人員可以在自己的長(zhǎng)期實(shí)踐中摸索其規(guī)律或者其他有效的方法,。當(dāng)故障分析結(jié)果集中于某一印制電路板上時(shí),,由于電路集成度的不斷擴(kuò)大,要把故障落實(shí)于其上某一區(qū)域乃至某一元件是十分困難的,。為了縮短停機(jī)時(shí)間,,在具有相同備件的條件下,可以先將備件換上,,然后再去檢查修復(fù)故障板,。但在拔出舊板更換新板之前,一定要先仔細(xì)閱讀相關(guān)資料,,弄懂要求和操作步驟之后再動(dòng)手,,以免出現(xiàn)更大的故障。