隨著工業(yè)自動化的不斷發(fā)展與進(jìn)步,高效且安全的要求逐漸的凸顯出來,。各企業(yè)在不斷地追求效益擴(kuò)大的同時也會伴隨有很多的安全隱患,,尤其是一些起重設(shè)備,、港口設(shè)備,、建筑機(jī)械設(shè)備,、工程機(jī)械設(shè)備對于安全的要求越來越突出,,最近常常會有一些設(shè)備安全事故的報道,,類似于大跨度門式起重機(jī)的軌道輪啃軌,、出軌和側(cè)翻等事故(事故會產(chǎn)生人員傷亡,,而租用大型吊車為行車重新整裝定位動輒幾十萬上百萬);塔式起重機(jī)由于沒有力矩運算引起的超載倒塌事件,;多設(shè)備塔機(jī)和行車在公共區(qū)域碰撞等等,。要防止類似事件的發(fā)生,保證人員設(shè)備的安全就必須讓控制器隨時準(zhǔn)確知道設(shè)備當(dāng)前的狀態(tài),,有效的處理及規(guī)避可能出現(xiàn)的危險情況,,這就需要在設(shè)備上安裝相關(guān)的傳感器及節(jié)點控制器,而這些傳感器及控制器就必須滿足其準(zhǔn)確,、可靠且可以冗余控制的要求,。
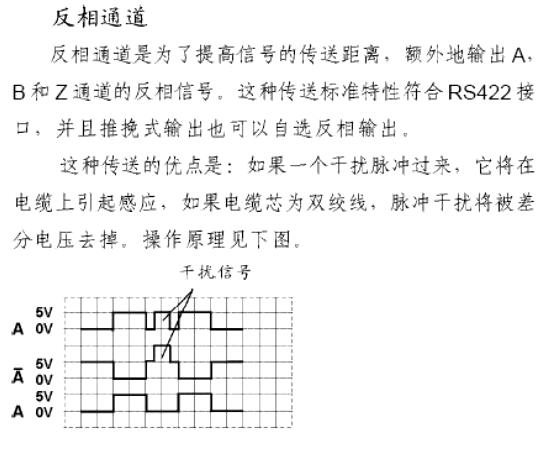
舉例來說,為了防止大跨度行車產(chǎn)生上述的各個危險內(nèi)容,,就需要加裝同步糾偏控制儀,,在行車兩個軌道上的輪子進(jìn)退位置不一致的時候進(jìn)行傳動設(shè)備的速度調(diào)節(jié),保證雙腿的同步前進(jìn),。同步糾偏控制儀就是實現(xiàn)這一功能的,,原有普通的糾偏儀可通過增量編碼器送過來的脈沖信號計算雙輪的當(dāng)前速度,然后控制速度同步,,它存在的問題是微小的速度偏差是在行程上不斷累加的,,而且增量信號的干擾問題及零點的漂移問題需要定期進(jìn)行標(biāo)定,,很是麻煩,而如沒有及時的修正就必然存在安全隱患,。另外有一種方式是利用兩個絕對值多圈編碼器將兩個輪子當(dāng)前走過的距離傳送到控制器,,由控制器比較兩值的大小,再去控制超前的動力設(shè)備需要減慢速度,。這就牽涉到編碼器至控制器采用什么通訊方式更合理且安全,。
CANopen總線同步糾偏控制儀,選用CANopen絕對值真多圈編碼器與控制器連接,,不僅實現(xiàn)了絕對值編碼器絕對位置同步比較功能,,而且由于CANopen協(xié)議具有高速發(fā)送數(shù)據(jù)的功能,就不僅僅大大的提升了數(shù)據(jù)傳輸?shù)乃俣?,保證了數(shù)據(jù)的實時性,,同樣因為CANopen數(shù)據(jù)幀帶有信息標(biāo)識符,所以保證了高優(yōu)先級(緊急事件)節(jié)點及時把數(shù)據(jù)告知控制器,,控制器好在第一時間作出反應(yīng),,而且本系統(tǒng)的 CANopen控制器可以實現(xiàn)多主站連接方式,利用CANopen協(xié)議的這些特點,,就可以實現(xiàn)重點設(shè)備的雙冗余備份(包括同步控制器和傳感器),。相比較其它的總線方式在設(shè)備備份上一般采用串行鏈路方式,備份控制器平時處于休眠方式,,間歇的與主控制器進(jìn)行通訊查驗是否主控器失效,,如果發(fā)現(xiàn)失效則激活工作,這中間有一定的時間差,,而CANopen總線的主控器和備份控制器則可以同時工作,,實現(xiàn)無縫切換,保證設(shè)備的正常運行,,同樣的,,CANopen傳感器也可以做備份,在同一個總線系統(tǒng)中,實現(xiàn)雙冗余同步控制,。
這樣的高速,、冗余安全控制同樣可以適用于建筑塔機(jī)的安全力矩、安全區(qū)域控制,,港口機(jī)械,、工程機(jī)械的安全控制。
安全的保證需要產(chǎn)品具有有效的故障界定,、高速響應(yīng),、高抗干擾性,CANopen總線在上世紀(jì)80年代設(shè)計的時候是針對車輛而開發(fā)的,,車輛系統(tǒng)無法有效接地,、干擾源繁多等特點要求總線具有數(shù)據(jù)出錯率低,、高速響應(yīng),設(shè)計師也解決了這些難點,,所以CANopen總線不僅僅是一個新發(fā)展的具有生命力的總線協(xié)議,,更重要的是它具有有效的故障界定,保證極低的未檢測故障率,。
CANopen絕對值多圈/單圈編碼器還具有節(jié)點心跳功能,,告訴控制器本編碼器是否在正常工作,同時也為了適應(yīng)各種設(shè)備在復(fù)雜電氣環(huán)境下使用的市場,,在產(chǎn)品防護(hù)等級及電氣保護(hù)上做了很多的工作,,目前該產(chǎn)品電磁兼容性EMC已達(dá)到3級。用該編碼器配接GEMPLE公司的PFC201總線同步糾偏儀可實現(xiàn)上述各設(shè)備的安全控制,。