加工行業(yè)中交流伺服電機(jī)如何選型及計(jì)算?伺服電機(jī)提升機(jī)床定位精度介紹!
加工中心通常采用閉環(huán)控制或半閉環(huán)控制,對伺服驅(qū)動安裝的性能提出了更高的請求,。隨著現(xiàn)代加工中心向高速度、高精度和高牢靠性方向開展,交流伺服電機(jī)已取代直流伺服電機(jī)普遍應(yīng)用在加工中心的進(jìn)給傳動系統(tǒng)上,。欲使交流伺服電機(jī)得到合理運(yùn)用并充分發(fā)揮電機(jī)的性能,則必需在加工中心設(shè)計(jì)時對電機(jī)停止正確的選型與計(jì)算。

1交流伺服電機(jī)的工作特性目前,在加工中心進(jìn)給傳動中運(yùn)用的伺服電機(jī)主要是永磁式交流伺服電機(jī),其工作特性曲線如圖1所示。電機(jī)的工作區(qū)域被劃分為連續(xù)工作和連續(xù)工作兩個區(qū)域,在連續(xù)工作區(qū)內(nèi),電機(jī)任何轉(zhuǎn)速與轉(zhuǎn)矩的組合都能夠使電機(jī)長時間穩(wěn)定連續(xù)運(yùn)轉(zhuǎn);固然在該區(qū)域內(nèi)隨著電機(jī)轉(zhuǎn)速的升高,轉(zhuǎn)矩略有降落,但降落的幅度不大,根本上是恒轉(zhuǎn)矩輸出,。與直流伺服電機(jī)相比,永磁式交流伺服電機(jī)的機(jī)械特性更硬,連續(xù)工作區(qū)的范圍更大而且不封頂,有利于進(jìn)步電機(jī)的加、減速才能,。電機(jī).T/(Nm)EFn/(r/min)永磁式交流伺服電機(jī)工作特性曲線主要技術(shù)參數(shù)包括:
1)額定轉(zhuǎn)矩:是指電機(jī)在額定轉(zhuǎn)速下所能輸出的長時間工作轉(zhuǎn)矩,。通常折算到電機(jī)軸上的負(fù)載力矩應(yīng)小于電機(jī)的額定轉(zhuǎn)矩,。
2)瞬時最大轉(zhuǎn)矩:是指電機(jī)在短時間內(nèi)可輸出的最大轉(zhuǎn)矩;它反映了電機(jī)瞬時過載才能,。從電機(jī)的工作特性曲線能夠看出,永磁式交流伺服電機(jī)的瞬時轉(zhuǎn)矩能夠到達(dá)很大的數(shù)值,并且能夠是額定轉(zhuǎn)矩?cái)?shù)倍;因而,折算到電機(jī)軸上的最大加速力矩應(yīng)小于電機(jī)提供的瞬時轉(zhuǎn)矩,。
3)轉(zhuǎn)動慣量:是對電機(jī)轉(zhuǎn)子轉(zhuǎn)動時慣性的度量,。交流伺服電機(jī)的轉(zhuǎn)子慣量較直流伺服電機(jī)小,故允許電機(jī)高速工作。
4)額定轉(zhuǎn)速:是指電機(jī)在額定功率條件下運(yùn)轉(zhuǎn)時的轉(zhuǎn)速,有時也稱額定轉(zhuǎn)速為電機(jī)的最高轉(zhuǎn)速,。在通常狀況下,交流伺服電機(jī)的調(diào)速范圍都在額定轉(zhuǎn)速以下,。
5)額定功率:是指電機(jī)在額定狀態(tài)下電機(jī)軸輸出功率的額定值,是電機(jī)長時間連續(xù)運(yùn)轉(zhuǎn)所能輸出的最大功率,。其值大約為電機(jī)額定轉(zhuǎn)速與額定轉(zhuǎn)矩的乘積,。電機(jī)在額定功率條件下工作,能夠長時間連續(xù)運(yùn)轉(zhuǎn)而不致過熱;否則,電機(jī)將產(chǎn)生過熱,而長時間過熱則有燒壞電機(jī)的風(fēng)險(xiǎn)。
2電機(jī)軸上產(chǎn)生的最大負(fù)載力矩
2.1負(fù)載力矩1)切削負(fù)載力矩Tc(Nm):由切削分力產(chǎn)生,可按式(1)計(jì)算,。Tc=FaLp2i(1)式中:Fa為在切削狀態(tài)下滾珠絲杠的軸向負(fù)載力,N;Lp為電機(jī)每轉(zhuǎn)一圈,機(jī)床執(zhí)行部件在軸向挪動的間隔,m;為進(jìn)給傳動系統(tǒng)的總效率,取=0.90;i為進(jìn)給傳動系統(tǒng)的降速比,。
2)摩擦負(fù)載力矩Tu(Nm):由導(dǎo)軌摩擦力產(chǎn)生,可按式(2)計(jì)算。Tu=Fa0Lp2i(2)式中:Fa0為為空載時的導(dǎo)軌摩擦力,N,。
3)附加負(fù)載力矩Tf(Nm):由滾珠絲杠的預(yù)緊而產(chǎn)生,可按式(3)計(jì)算,。Tf=FpL02i(1-20)(3)式中:Fp為滾珠絲杠螺母副的預(yù)緊力,N;L0為滾珠絲杠的根本導(dǎo)程,m;0為滾珠絲杠的效率,取0=0.98。
2.2最大負(fù)載力矩T由于機(jī)床在空載進(jìn)給(快進(jìn))和切削進(jìn)給(工進(jìn))時的負(fù)載狀況不同,所以空載進(jìn)給(快進(jìn))時的最大負(fù)載力矩TKJ和切削進(jìn)給(工進(jìn))時的最大負(fù)載力矩TGJ分別按式(4a),、(4b)計(jì)算,。TKJ=Tu+Tf(4a)TGJ=Tc+Tf(4b)3電機(jī)軸上所需的最大加速力矩
3.1加速力矩1)直線加速力矩Tal(Nm):是機(jī)床執(zhí)行部件按線性規(guī)律加速產(chǎn)生的力矩,可按式(5)計(jì)算。Tal=nmax3ta(Jm+JL)(1-e-ksta)10-5(5)式中:nmax為執(zhí)行部件以最快速度挪動時所對應(yīng)的電機(jī)最高轉(zhuǎn)速,r/min;Jm為電機(jī)的轉(zhuǎn)動慣量,kgcm2;JL為負(fù)載慣量,kgcm2;ks為伺服系統(tǒng)的位置環(huán)增益,Hz;對輪廓控制通常取ks=20Hz;ta為加速時間,s;取ta=3/k
伺服電機(jī)在提升機(jī)床定位精度中的設(shè)計(jì)與應(yīng)用
引言數(shù)控機(jī)床自動控制系統(tǒng)所發(fā)出的控制指令是經(jīng)過進(jìn)給驅(qū)動伺服電機(jī)轉(zhuǎn)動銜接機(jī)械執(zhí)行部件,最終完成機(jī)床精準(zhǔn)的進(jìn)給運(yùn)動和定位,。數(shù)控機(jī)床的進(jìn)給驅(qū)動系統(tǒng)是一種位置隨動與定位系統(tǒng),表現(xiàn)為伺服電機(jī)能快速,、精確地執(zhí)行由數(shù)控系統(tǒng)發(fā)出的運(yùn)動命令信號輸出,準(zhǔn)確地控制機(jī)床進(jìn)給傳動鏈的坐標(biāo)運(yùn)動,。伺服電機(jī)的響應(yīng)控制與銜接機(jī)械執(zhí)行部件在一定水平上決議了數(shù)控機(jī)床的運(yùn)用性能,如高精細(xì)機(jī)床,請求納米級伺服電機(jī)。機(jī)床的最高挪動速度,、輪廓跟隨速度,、還有機(jī)床定位精度等。為了完成機(jī)床的高速,、高精加工等性能與之配套的功用部件如電主軸,、直線電機(jī)、伺服電機(jī)等得到了快速開展,應(yīng)用范疇進(jìn)一步擴(kuò)展,。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速,能快速反響,速度,、位置精度十分精確。因而在數(shù)控機(jī)床的定位精度中,用作執(zhí)行元件,具有機(jī)電時間常數(shù)小,、線性度高等特性,對提升機(jī)床的定位精度十分關(guān)鍵,。本文以FANUC伺服電機(jī)為例研討設(shè)計(jì)在提升機(jī)床定位精度中的應(yīng)用。
1 FANUC伺服電動機(jī)
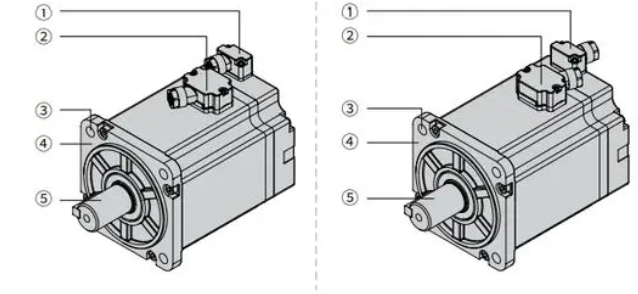
1.1電機(jī)引見伺服電機(jī)的某一實(shí)物,。
(1)是電機(jī)編碼器的插頭;
(2)為電機(jī)的動力線插頭;
(3)為電機(jī)的型號;
(4)電機(jī)的抱閘線插頭(不帶抱閘的電機(jī)沒有此插頭),。
1.2伺服電動機(jī)的特性
(1)高速和高加速度。高速性能好,普通額定轉(zhuǎn)速能到達(dá)2000~3000,。
(2)高精度,。準(zhǔn)確的控制電機(jī)的轉(zhuǎn)動,完成了位置,速度和力矩的閉環(huán)控制,完成準(zhǔn)確的定位,能夠到達(dá)0.001mm。
(3)低噪音,低污染,高效節(jié)能,。
2 FANUC伺服電機(jī)設(shè)計(jì)原理[1]FANUC主要設(shè)計(jì)運(yùn)用的伺服電動機(jī)有兩種:一用于主軸驅(qū)動的交流感應(yīng)異步電動機(jī),。二用于伺服驅(qū)動的交流永磁同步電動機(jī)。(圖2)感應(yīng)電動機(jī)的優(yōu)勢是有效控制電動機(jī)在額定轉(zhuǎn)速區(qū)間工作,輸出額定速度范圍內(nèi)的恒功率,。在數(shù)控機(jī)床中恒功率特性常被用于穩(wěn)定的轉(zhuǎn)速輸出比方主軸驅(qū)動,主軸刀具切削進(jìn)給時需求穩(wěn)定的功率輸出,。
普通主軸電動機(jī)的規(guī)格以功率表示,例如主軸電動機(jī)標(biāo)牌為a22表示該主軸電動機(jī)的功率為22kW。同步電動機(jī)[1]轉(zhuǎn)子采用永磁體,加之高分辨率編碼器,跟蹤電動機(jī)轉(zhuǎn)子實(shí)時旋轉(zhuǎn)角度并反應(yīng)給數(shù)控系統(tǒng),經(jīng)過位置環(huán),、速度環(huán),、電流環(huán)控制保證轉(zhuǎn)子的高精度同步定位,完成了低速大扭矩及高精度同步旋轉(zhuǎn)的恒轉(zhuǎn)矩特性,這一特性在數(shù)控機(jī)床中被用于伺服電動機(jī)驅(qū)動。伺服電動機(jī)規(guī)格以扭矩表示,例如伺服電動機(jī)標(biāo)牌為a 2.2表示該伺服電動機(jī)扭矩為22N·m(?!っ?,。扭矩T與功率P之間的關(guān)系為Tω=P由于ω(弧度秒)=2πn/60(轉(zhuǎn)/分)所以得出關(guān)系式T=9550P/n其中扭矩T的計(jì)量單位為牛·米,功率P的計(jì)量單位為千瓦,轉(zhuǎn)速n的計(jì)量單位為轉(zhuǎn)/分,。(China National Heavy Duty Truck Gear Co.,Ltd.,Datong 037000,China)兩種伺服電機(jī)的設(shè)計(jì)工作原理是有相同之處,兩種均是經(jīng)過定子磁場的旋轉(zhuǎn)帶動轉(zhuǎn)子旋轉(zhuǎn),控制定子磁場旋轉(zhuǎn)的驅(qū)動電路原理是相同的,大多采用脈寬調(diào)制處置,。不同之處是在反應(yīng)電路處置和位置環(huán)控制上,選擇功用性差異適用不同的定位請求。
3 FANUC伺服電動機(jī)的銜接TC1為三相伺服控制變壓器,電路動力電源為三相380V經(jīng)過伺服控制變壓器轉(zhuǎn)換成三相200V后提供到X軸,、Z軸伺服電機(jī)驅(qū)動單元的L1,、L2、L3端子,提供了伺服單元的控制電路電源。外部24V直流穩(wěn)壓電源銜接到控制系統(tǒng)X軸伺服單元的接口CXA19A,X軸伺服單元的接口CXA19B銜接到Z軸伺服單元的接口CXA19A,經(jīng)過A-B互相串聯(lián)接口傳輸,提供伺服單元的控制電路的輸入電源,。