步進(jìn)和伺服電機(jī)操作為什么要回原點(diǎn)?伺服系統(tǒng)的組成與控制原理介紹,!
一,、初次運(yùn)行程序。
第一次運(yùn)行程序,,雖然當(dāng)前位置可能是0,,也有原點(diǎn)信號(hào)輸入,但系統(tǒng)并不知道原點(diǎn)信號(hào)在什么位置,,要執(zhí)行絕對(duì)定位,,必須要利用回原點(diǎn)指令通過特定的方式搜尋到原點(diǎn)信號(hào),,才是真正的原點(diǎn)。
二,、經(jīng)過多次定位后為了消除誤差,需執(zhí)行回原點(diǎn),。

步進(jìn)系統(tǒng)為開環(huán)控制,,在運(yùn)動(dòng)中容易出現(xiàn)丟步或越步產(chǎn)生誤差,,機(jī)械本身也存在間隙產(chǎn)生誤差,經(jīng)過多次反復(fù)定位后,,累積的誤差會(huì)越來越大,,使定位精度無法滿足要求,所以要執(zhí)行回原點(diǎn)操作,。伺服系統(tǒng)雖然為閉環(huán)控制,,不會(huì)產(chǎn)生丟步和越步現(xiàn)象,但是PLC發(fā)送的脈沖傳輸?shù)剿欧?qū)動(dòng)的線路上可能會(huì)產(chǎn)生干擾,,以及機(jī)械間隙造成的誤差,,也會(huì)影響定位的精度,所以一段時(shí)間后也要執(zhí)行回原點(diǎn)操作,。
三,、斷電后位置改變或丟失,需執(zhí)行回原點(diǎn),。
步進(jìn)電機(jī)沒有編碼器,,伺服電機(jī)通常安裝的是增量型編碼器,斷電后無法設(shè)別位置變化,,所以當(dāng)切斷電源后,,有人為、重力或慣性等原因造成位置改變,,PLC再也無法準(zhǔn)確的得知當(dāng)前位置,,為了保證定位的精準(zhǔn)性,需要執(zhí)行回原點(diǎn)操作,。如果斷電后沒有改變電機(jī)的位置或者電機(jī)安裝了絕對(duì)值編碼器,,再次上電還需要執(zhí)行回原點(diǎn)嗎?雖然增量型編碼器斷電后無法識(shí)別位置,,但是在斷電前我們可以將當(dāng)前位置存儲(chǔ)在PLC斷電保持存儲(chǔ)區(qū)地址中,,即使斷電當(dāng)前位置也不會(huì)丟失,上電后不需要回原點(diǎn),。絕對(duì)值編碼器斷電后即使轉(zhuǎn)動(dòng)了,,上電后也能自動(dòng)識(shí)別當(dāng)前位置,,所以不需要回原點(diǎn),但是值得注意的是,,絕對(duì)值編碼器分為單圈和多圈,,斷電后轉(zhuǎn)動(dòng)的位置一定要在可識(shí)別的范圍內(nèi),否則也需要回原點(diǎn),。
四,、執(zhí)行復(fù)位等操作清除了當(dāng)前位置。
當(dāng)程序出現(xiàn)故障,,為了能夠重新開始,,我們需要執(zhí)行復(fù)位操作,將所有狀態(tài)包括當(dāng)前位置全部復(fù)位成初始狀態(tài),,這樣我們必須執(zhí)行回原點(diǎn)操作,。
以上介紹了四種回原點(diǎn)的場(chǎng)合,僅代表個(gè)人對(duì)回原點(diǎn)的理解,,不排除還有其它情況需要回原點(diǎn),,歡迎參與交流探討。
伺服驅(qū)動(dòng)器工作原理和控制方式
伺服驅(qū)動(dòng)器的基本功能是電動(dòng)機(jī)驅(qū)動(dòng)和信號(hào)反饋?,F(xiàn)在多數(shù)伺服驅(qū)動(dòng)器具有獨(dú)立的控制系統(tǒng),,一般采用數(shù)字信號(hào)處理器、高性能單片機(jī),、FPGA等作為主控芯片,。控制系統(tǒng)輸出的信號(hào)為數(shù)字信號(hào),,并且信號(hào)的電流較小,,不能直接驅(qū)動(dòng)電動(dòng)機(jī)運(yùn)動(dòng)。
伺服驅(qū)動(dòng)器還需要將數(shù)字信號(hào)轉(zhuǎn)換為模擬信號(hào),,并且進(jìn)行放大來驅(qū)動(dòng)電動(dòng)機(jī)運(yùn)動(dòng),。伺服驅(qū)動(dòng)器內(nèi)部集成了主控系統(tǒng)電路、基于功率器件組成的驅(qū)動(dòng)電路,、電流采集電路,、霍爾傳感器采集電路,以及過電壓,、過電流,、溫度檢測(cè)等保護(hù)電路。
伺服系統(tǒng)組成,、概述與控制原理
伺服系統(tǒng)既可以是開環(huán)控制方式,,也可以是閉環(huán)控制方式。
一,、伺服系統(tǒng)簡(jiǎn)述
伺服系統(tǒng)(servomechanism)指經(jīng)由閉環(huán)控制方式達(dá)到對(duì)一個(gè)機(jī)械系統(tǒng)的位置,、速度和加速度的控制,。一個(gè)伺服系統(tǒng)的構(gòu)成包括被控對(duì)象、執(zhí)行器和控制器(負(fù)載,、伺服電動(dòng)機(jī)和功率放大器,、控制器和反饋裝置)。
1,、執(zhí)行器的功能在于提供被控對(duì)象的動(dòng)力,,其構(gòu)成主要包括伺服電動(dòng)機(jī)和功率放大器,伺服電動(dòng)機(jī)包括反饋裝置如光電編碼器,、旋轉(zhuǎn)編碼器或光柵等(位置傳感器),。
2,、控制器的功能在于提供整個(gè)伺服系統(tǒng)的閉環(huán)控制如轉(zhuǎn)矩控制,、速度控制、位置控制等,,伺服驅(qū)動(dòng)器通常包括控制器和功率放大器,。
3、反饋裝置除了位置傳感器,,可能還需要電壓,、電流和速度傳感器。
“伺服”——詞源于希臘語“奴隸”的意思,。人們想把“伺服機(jī)構(gòu)”當(dāng)成一個(gè)得心應(yīng)手的馴服工具,,服從控制信號(hào)的要求而動(dòng)作:在訊號(hào)來到之前,轉(zhuǎn)子靜止不動(dòng),;訊號(hào)來到之后,,轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)訊號(hào)消失,,轉(zhuǎn)子能即時(shí)自行停轉(zhuǎn),。由于它的“伺服”性能,因此而得名——伺服系統(tǒng),。
二,、常用參數(shù)
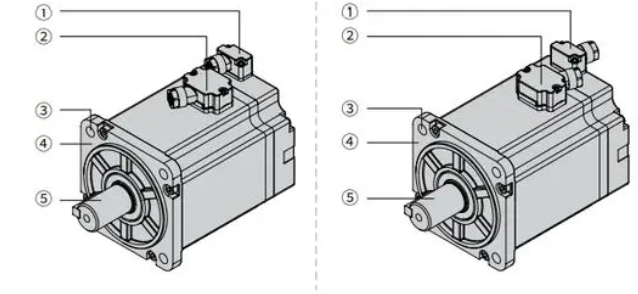
1、伺服電機(jī)銘牌參數(shù)
1,、法蘭尺寸
2,、電機(jī)極對(duì)數(shù)
3、電機(jī)額定輸出功率
4,、電源電壓規(guī)格:?jiǎn)蜗?三相
5,、電機(jī)慣量:分為大、中,、小慣量,,指的是轉(zhuǎn)子本身的慣量,,從響應(yīng)角度來講,電機(jī)的轉(zhuǎn)子慣量應(yīng)小為好,;從負(fù)載角度來看,,電機(jī)的轉(zhuǎn)自慣量越大越好
6、電機(jī)出軸類型:鍵槽,、扁平軸,、光軸、減速機(jī)適配…
7,、電機(jī)動(dòng)力線定義:U:REDV:BLACKW:WHITE
8,、額定轉(zhuǎn)速
9、編碼器線數(shù):2500/1250/1000/17B/20B
法蘭是軸與軸之間相互連接的零件,,用于管端之間的連接,。
2、伺服驅(qū)動(dòng)器銘牌參數(shù)
1,、額定輸出功率
2,、電源電壓規(guī)格
3、編碼器線數(shù)
3,、伺服系統(tǒng)的性能指標(biāo)
1,、檢測(cè)誤差:包括給定位置傳感器和反饋位置傳感器的誤差,傳感器本身固有,,無法克服,;
2、系統(tǒng)誤差:系統(tǒng)類型決定了系統(tǒng)誤差,。
只要p+q>0,,對(duì)階躍輸入信號(hào)就有足夠的跟蹤能力;對(duì)于速度輸入信號(hào),I型系統(tǒng)跟蹤能力大幅削弱,,跟隨誤差與開環(huán)傳遞函數(shù)的比例系數(shù)成反比,,II型仍具有優(yōu)良跟蹤能力;對(duì)于加速度輸入信號(hào),,僅II型系統(tǒng)能勉強(qiáng)跟隨,。
三、伺服電機(jī)相關(guān)
1,、伺服電機(jī)的選型
1,、系統(tǒng)精度:需綜合考慮轉(zhuǎn)子轉(zhuǎn)動(dòng)慣量、電動(dòng)機(jī)類型,、轉(zhuǎn)矩抖動(dòng)等
2,、電動(dòng)機(jī)功率:負(fù)載方式及大小計(jì)算輸出力矩
3、電動(dòng)轉(zhuǎn)速
4,、選配剎車:剎車用來在電機(jī)停止時(shí)候鎖定位置,,不讓電機(jī)由于外力作用發(fā)生運(yùn)動(dòng),;并非在運(yùn)行時(shí)剎車。
5,、過載能力
2,、伺服電機(jī)的反饋裝置/電機(jī)轉(zhuǎn)一圈所需脈沖數(shù)
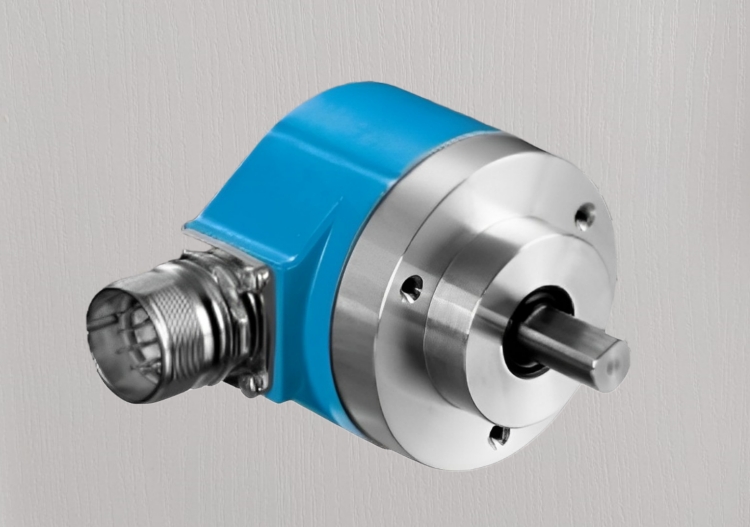
伺服系統(tǒng)常用的檢測(cè)元件以光電編碼器最為常見。
編碼器(encoder)是將信號(hào)(如比特流)或數(shù)據(jù)進(jìn)行編制,、轉(zhuǎn)換為可用以通訊,、傳輸和存儲(chǔ)的信號(hào)形式的設(shè)備。
根據(jù)檢測(cè)原理,,編碼器可分為光學(xué)式,、磁式、感應(yīng)式和電容式,。根據(jù)其刻度方法及信號(hào)輸出形式,,可分為增量式、絕對(duì)式以及混合式三種,。
增量式:每轉(zhuǎn)過單位的角度就發(fā)出一個(gè)脈沖信號(hào)
絕對(duì)式:就是對(duì)應(yīng)一圈,,每個(gè)基準(zhǔn)的角度發(fā)出一個(gè)唯一與該角度對(duì)應(yīng)二進(jìn)制的數(shù)值,,通過外部記圈器件可以進(jìn)行多個(gè)位置的記錄和測(cè)量
編碼器和電流環(huán)沒有任何聯(lián)系,,它的采樣來自于電機(jī)的轉(zhuǎn)動(dòng)。
編碼器線數(shù):即編碼器分辨率,,也即一轉(zhuǎn)所發(fā)出的脈沖數(shù),,例如2500線表示轉(zhuǎn)一圈需要發(fā)送2500個(gè)脈沖,這說明伺服電機(jī)轉(zhuǎn)一圈所需脈沖數(shù)是固定的,,且與電機(jī)自帶編碼器參數(shù)相關(guān),。
可以發(fā)現(xiàn)線數(shù)有兩種,一種類似2500線,、1600線等,,一種為17位(17B)、20位(20B)等,。前者為增量式編碼器線數(shù),,后者為絕對(duì)式編碼器線數(shù),17B表示一轉(zhuǎn)所需的脈沖數(shù)為2^17即131072個(gè)脈沖,。
四,、伺服驅(qū)動(dòng)器控制原理
運(yùn)動(dòng)伺服一般都是三環(huán)控制系統(tǒng),從內(nèi)到外依次是電流環(huán),、速度環(huán)和位置環(huán),。
伺服的控制方式有3種,分別是位置控制,、速度控制和轉(zhuǎn)矩控制,。
1,、轉(zhuǎn)矩控制(電流環(huán)/單環(huán)控制):轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小??梢酝ㄟ^即時(shí)的改變模擬量的設(shè)定來改變?cè)O(shè)定的力矩大小,,也可通過通訊方式改變對(duì)應(yīng)的地址的數(shù)值來實(shí)現(xiàn)。主要應(yīng)用于需要嚴(yán)格控制轉(zhuǎn)矩的場(chǎng)合,,在轉(zhuǎn)矩模式下驅(qū)動(dòng)器的運(yùn)算最小,,動(dòng)態(tài)響應(yīng)最快。
單環(huán)控制難以滿足伺服系統(tǒng)的動(dòng)態(tài)要求,,一般不采用,。
2、速度控制(速度環(huán),、電流環(huán)/雙環(huán)控制):通過模擬量的輸入或脈沖的頻率都可以進(jìn)行轉(zhuǎn)動(dòng)速度的控制,。速度控制包含了速度環(huán)和電流環(huán)。任何模式都必須使用電流環(huán),,電流環(huán)是控制的跟本,。
3、位置控制(三環(huán)控制):伺服中最常用的控制,。位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉(zhuǎn)動(dòng)速度的大小,,通過脈沖的個(gè)數(shù)來確定轉(zhuǎn)動(dòng)的角度(類似步進(jìn)電機(jī)),也有些伺服可以通過通訊方式直接對(duì)速度和位移進(jìn)行賦值(外部模擬量的輸入),。由于位置模式可以對(duì)速度和位置都有很嚴(yán)格的控制,,所以一般應(yīng)用于定位裝置。
位置控制模式下系統(tǒng)進(jìn)行了所有3個(gè)環(huán)的運(yùn)算,,此時(shí)的系統(tǒng)運(yùn)算量最大,,動(dòng)態(tài)響應(yīng)速度也最慢。
轉(zhuǎn)矩控制:是指伺服驅(qū)動(dòng)器僅對(duì)電機(jī)的轉(zhuǎn)矩進(jìn)行控制
速度控制:是指驅(qū)動(dòng)器僅對(duì)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩進(jìn)行控制
位置控制:是指驅(qū)動(dòng)器對(duì)電機(jī)的轉(zhuǎn)速,、轉(zhuǎn)角和轉(zhuǎn)矩進(jìn)行控制
APR——位置調(diào)節(jié)器,;ASR——速度調(diào)節(jié)器;ACR——電流調(diào)節(jié)器
4,、三環(huán)就是3個(gè)閉環(huán)負(fù)反饋PID調(diào)節(jié)系統(tǒng),。
第一環(huán)為電流環(huán),最內(nèi)環(huán),。此環(huán)完全在伺服驅(qū)動(dòng)器內(nèi)部進(jìn)行,,其PID常數(shù)已被設(shè)定,無需更改,。電流環(huán)的輸入是速度環(huán)PID調(diào)節(jié)后的輸出,,電流環(huán)的輸出就是電機(jī)的每相的相電流。**電流環(huán)的功能為對(duì)輸入值和電流環(huán)反饋值的差值進(jìn)行PD/PID調(diào)節(jié)。**電流環(huán)的反饋來自于驅(qū)動(dòng)器內(nèi)部每相的霍爾元件,。電流閉環(huán)控制可以抑制起,、制動(dòng)電流,加速電流的響應(yīng)過程,。
第二環(huán)為速度環(huán),,中環(huán)。速度環(huán)的輸入就是位置環(huán)PID調(diào)節(jié)后的輸出以及位置設(shè)定的前饋值,。**電流環(huán)的功能為對(duì)輸入值和速度環(huán)反饋值的差值進(jìn)行PI調(diào)節(jié),。**速度環(huán)的反饋來自于編碼器的反饋后的值經(jīng)過“速度運(yùn)算器”的計(jì)算后得到的。
第三環(huán)為位置環(huán),,最外環(huán),。位置環(huán)的輸入就是外部的脈沖。**位置環(huán)的功能為對(duì)輸入值和位置環(huán)反饋值的差值進(jìn)行P調(diào)節(jié),。**位置環(huán)的反饋來自于編碼器反饋的脈沖信號(hào)經(jīng)過“偏差計(jì)數(shù)器”的計(jì)算后得到的,。位置調(diào)節(jié)器APR其輸出限幅值是電流的最大值,決定著電動(dòng)機(jī)的最高轉(zhuǎn)速,。
位置環(huán),、速度環(huán)的參數(shù)調(diào)節(jié)沒有什么固定的數(shù)值,由很多因素決定,。
多環(huán)控制系統(tǒng)調(diào)節(jié)器的設(shè)計(jì)方法是從內(nèi)環(huán)到外環(huán),,逐個(gè)設(shè)計(jì)各環(huán)調(diào)節(jié)器,使每個(gè)控制環(huán)都是穩(wěn)定的,,從而保證整個(gè)控制系統(tǒng)的穩(wěn)定性,;每個(gè)環(huán)節(jié)都有自己的控制對(duì)象,,分工明確,,易于調(diào)整。這種設(shè)計(jì)的缺點(diǎn)在于對(duì)最外環(huán)控制作用的響應(yīng)不會(huì)很快
5,、伺服系統(tǒng)的增益參數(shù)
按照設(shè)備需求選擇,,選擇好合適的控制模式后,需要對(duì)伺服增益參數(shù)進(jìn)行合理的調(diào)整,。使得伺服驅(qū)動(dòng)器能快速,、準(zhǔn)確的驅(qū)動(dòng)電機(jī),最大限度發(fā)揮機(jī)械性能,。伺服增益通過多個(gè)參數(shù)進(jìn)行調(diào)整,,它們之間會(huì)相互影響。
1,、位置比例增益:設(shè)置值越大,,增益越高,剛度越大,,相同頻率指令脈沖條件下,,位置滯后量越小,。但數(shù)值太大可能會(huì)引起振蕩或超調(diào);
2,、位置前饋增益:位置環(huán)的前饋增益大,,控制系統(tǒng)的高速響應(yīng)特性提高,但會(huì)使系統(tǒng)的位置不穩(wěn)定,,容易產(chǎn)生振蕩,;
3、速度比例增益:設(shè)置值越大,,增益越高,,剛度越大,相同頻率指令脈沖條件下,,速度滯后量越小,。但數(shù)值太大可能會(huì)引起振蕩或超調(diào);
4,、速度積分時(shí)間常數(shù):設(shè)置值越小,,積分速度越快。
5,、速度反饋濾波因子:數(shù)值越大,,截止頻率越低,電機(jī)產(chǎn)生的噪音越??;數(shù)值越小,截止頻率越高,,速度反饋響應(yīng)越快,。
6、最大輸出轉(zhuǎn)矩設(shè)置
五,、伺服系統(tǒng)的設(shè)計(jì)
根據(jù)伺服電動(dòng)機(jī)的種類,,伺服系統(tǒng)可分為直流和交流兩大類。采用電流閉環(huán)控制后,,二者具有相同的控制對(duì)象數(shù)學(xué)模型,。因此可用相同的方法設(shè)計(jì)交流或直流伺服系統(tǒng)。對(duì)于閉環(huán)伺服控制系統(tǒng),,常用串聯(lián)校正或并聯(lián)校正方式進(jìn)行動(dòng)態(tài)性能的調(diào)節(jié),。校正裝置串聯(lián)配置在前向通道的校正方式稱為串聯(lián)校正,一般把串聯(lián)校正單元稱作調(diào)節(jié)器,,所以又稱調(diào)節(jié)器校正,;若校正裝置與前向通道并行,稱為并聯(lián)校正。
調(diào)節(jié)器校正:常用的調(diào)節(jié)器有PD調(diào)節(jié)器,、PI調(diào)節(jié)器和PID調(diào)節(jié)器,。設(shè)計(jì)中根據(jù)實(shí)際伺服系統(tǒng)的特征進(jìn)行選擇。
六,、系統(tǒng)接線及面板設(shè)置
此處僅作概述,。
系統(tǒng)接線
面板設(shè)置
七、伺服電動(dòng)機(jī)與其它電動(dòng)機(jī)的辨析
1,、伺服電動(dòng)機(jī)與普通電動(dòng)機(jī)的區(qū)別
1,、普通電動(dòng)機(jī)(有刷)多運(yùn)行于開環(huán)控制,伺服電動(dòng)機(jī)運(yùn)行于閉環(huán)控制,。
2,、伺服電動(dòng)機(jī)動(dòng)態(tài)性高
3、伺服電動(dòng)機(jī)啟動(dòng)轉(zhuǎn)矩大,、調(diào)速范圍寬
4,、伺服電動(dòng)機(jī)結(jié)構(gòu)緊湊
5、伺服電動(dòng)機(jī)定子散熱方便
2,、伺服電動(dòng)機(jī)與舵機(jī)的區(qū)別
舵機(jī)相當(dāng)于簡(jiǎn)化版的完整的伺服系統(tǒng),。
伺服電機(jī)都是三環(huán)控制,即電流環(huán),、速度環(huán),、位置環(huán);舵機(jī)只檢測(cè)位置環(huán)(一般用電位器),。
3,、伺服電動(dòng)機(jī)與步進(jìn)電動(dòng)機(jī)的區(qū)別
1、步進(jìn)電機(jī)多運(yùn)行于開環(huán)控制,,伺服電動(dòng)機(jī)運(yùn)行于閉環(huán)控制,。(使用步進(jìn)電機(jī)的場(chǎng)合,要么不需要位置反饋,,要么在其他設(shè)備上進(jìn)行位置反饋)
2,、伺服電機(jī)控制精度和定位高于步進(jìn)電機(jī)
3、伺服電機(jī)低頻特性好,,過載能力大,響應(yīng)時(shí)間短
4,、伺服電機(jī)調(diào)速范圍大于步進(jìn)電動(dòng)機(jī)
5,、步進(jìn)電機(jī)只能接受脈沖信號(hào),二私服電動(dòng)機(jī)可以接受模擬信號(hào),、脈沖信號(hào)和總線通信信號(hào)
伺服電機(jī)和步進(jìn)電機(jī)常被搞混,,二者外形相似,區(qū)別點(diǎn)在于伺服電機(jī)尾部的反饋裝置;此外步進(jìn)電機(jī)一般都是一個(gè)引出線端,,伺服電機(jī)由于帶編碼器所以有2個(gè)引線輸出端(編碼線和動(dòng)力線),。